已经可以通过ssh连接编译启动飞行了,但是耗电很快,15.5v就飞了十秒钟就没电了,请问是电池的问题吗,我买的电池是3000mA的好像
15.5V是低压了,要记得充电,满电是16.8v
我们标配的是5200mah,一般4S电池电压不能低于14V,否则会坏,所以每次飞行完毕要及时充电
祝贺飞行成功![]()
我们按用户手册的要求,先运行mavros,然后编译px4.py,虽然起飞成功了,但是我们还没有编译commander.py的时候,无人机就直接垂直飞天上去了,请问这是px4.py就这样设置的吗
请问理想情况是不是应该是先运行mavros,在编译px4.py,这时无人机不会动,最后编译commander.py的时候发布指令无人机才会运行呢
你可以把几个机器的代码同步下,分支需要是dev_kerlouduav。具体逻辑你看下代码,可以按需要修改,这个软件有些时间没更新了
早期的px4_mavros_run运行会让飞机一开始就起飞,之后听从commander.py指令
这个是另一个集群项目的开源代码,你可以参考下,这个里面在运行commander之前是不起飞的
https://gitee.com/cloudkernel-tech/offboard_python_dasa/tree/dev_kerlouddasa
3.2米起飞高度有点高在室内
提供其他的现象吧,比如飞机模式有没有切换到offboard?
这个代码不能直接用的
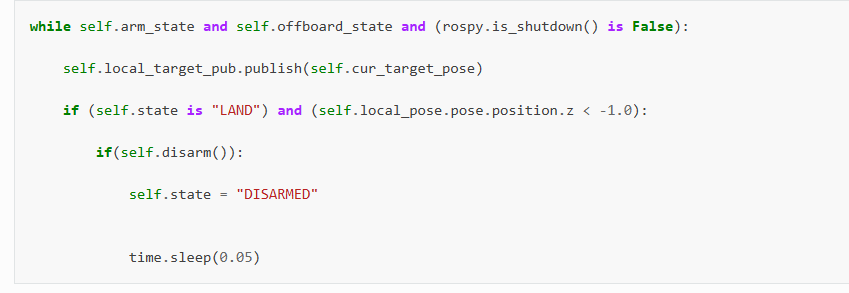
这个响应commander.py,设置定点的代码好像没有更改cur_target_pose,请问这句代码就是执行飞行到cur_target_pose的代码吗: self.local_target_pub.publish(self.cur_target_pose)
对的,提供的链接有解释
cur_target_pose是在callback中修改的,你查看下对应的topic
cur_target_pose是修改了的,但是无人机就是没有动作
Mavros 有没有正常启动?地面站有什么提醒?
只能是local_target_pub的问题了
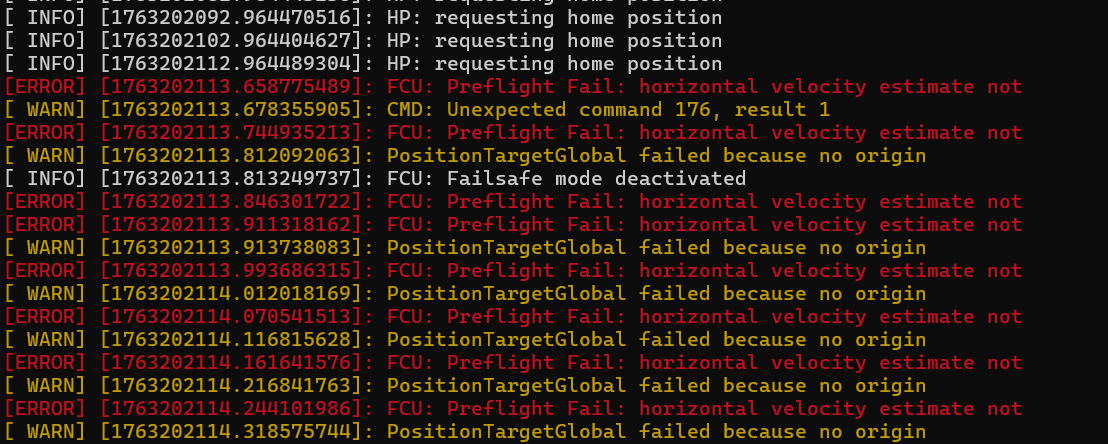
嗯,还是定位质量的问题,没有锁定,你看下光流正下方是不是纯黑色或者纯白色,以及光线