对,QGC只是飞机状态显示,出问题时会有报警信息,强烈建议开着
详细说明可以搜索乐迪对应的说明书,出厂时已经设置完毕,不用动的
飞行操作就看我们的演示视频就行了,参考之前回复的链接
通过ssh连接树莓派启动无人机的时候是不是需要遥控器调到offboard模式?还是说无人机连接电源之后就直接可以ssh连接树莓派编译启动了
- 如果使用机载电脑中的pythonuav_ros包进行操作,则代码会通过service将无人机解锁以及切换到offboard模式(即无人机会听从ROS端发来的指令)
- 但是为了安全起见,在进行代码运行之前,飞机切换到半自动Positio模式更好,这样可以避免摇杆的干扰信号
- 飞行模式由负责mode switch的摇杆直接控制,它的权限是最高的
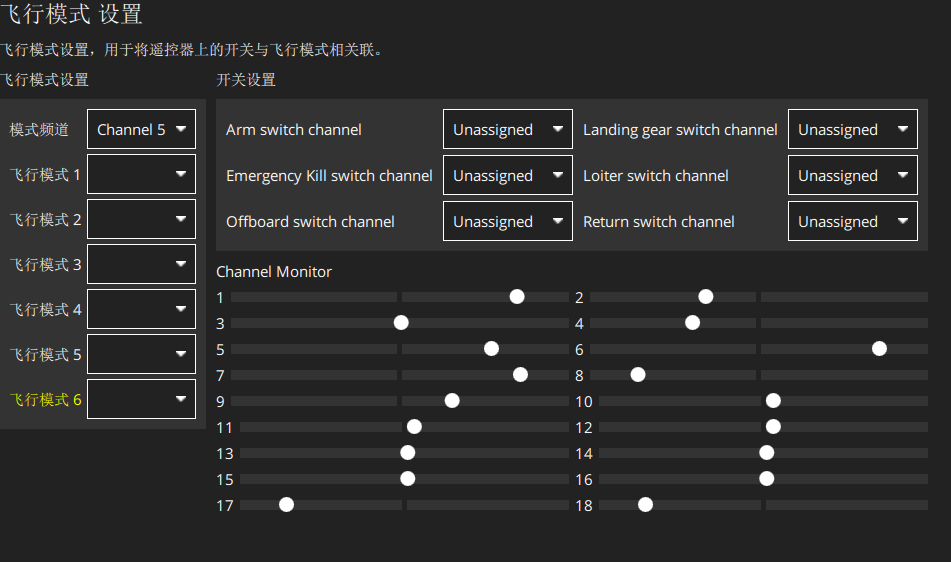


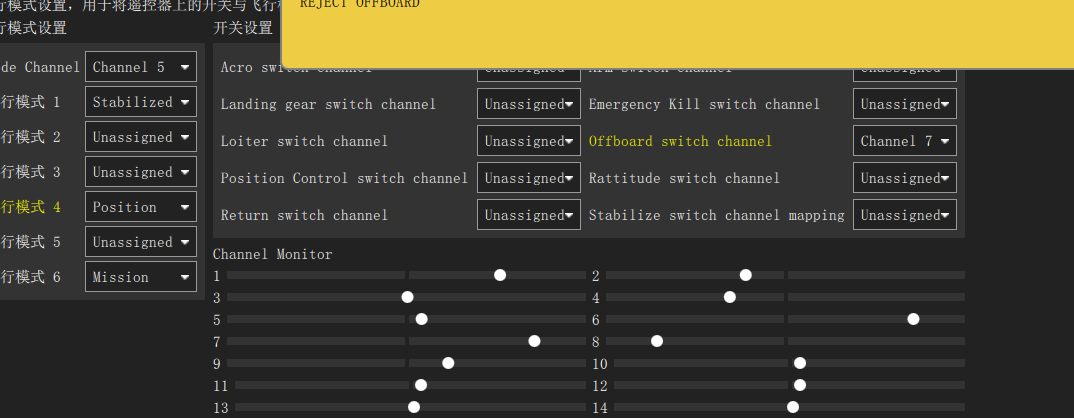
需要重新设置遥控器模式
不要管地面站不相关的提示
可以提示哪些通道设置哪些模式吗
链接里有图,请看下
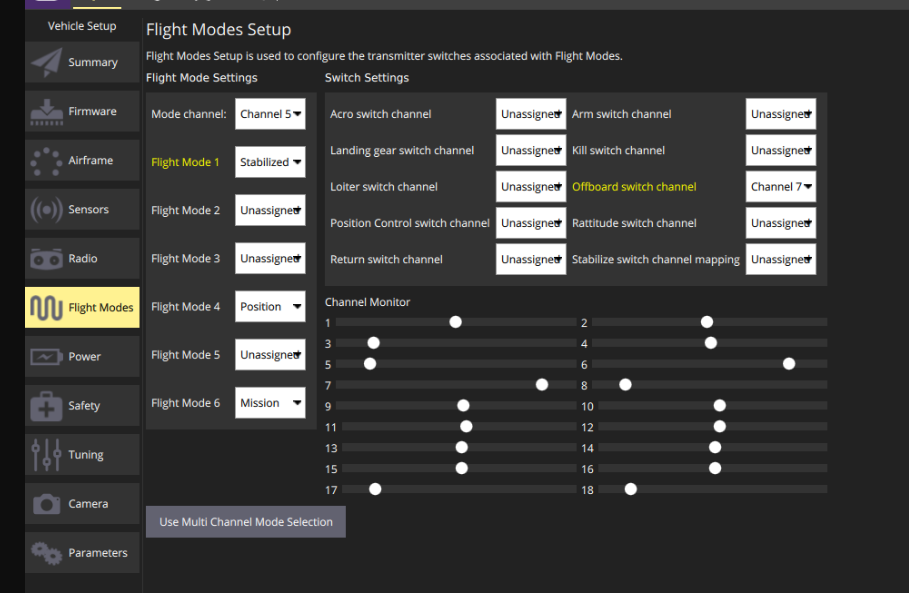
是的,按这个来就行,校准选择日本手
你可以再设置一个一键停桨(kill switch),紧急时可以用到

你检查下mavros有没有正常启动,并且执行
sudo chmod 777 /dev/ttyPixhawk
切换模式失败还是因为地面纹理问题,你那边环境不太理想,棋盘格太小了,纯色地板没有纹理,无法飞行的,能否买一个3m*3m尺寸的棋盘格?
如果切换到position模式不行,一般需要等一会,状态融合需要一点时间。在不能切换position模式时不要启动机载软件,因为机载软件依赖定位成功
同时注意下飞机的固件和参数不要修改。固件如果误操作刷掉了,请使用下述链接中的windows11地面站进行刷新。
https://cloudkernel.cn/kerloud-uav/quickstart-zh.html
参数如果修改了,请参考这里的快捷指令进行重置
飞机能否进入position模式是所有自动飞行的前提
这里是用户手册,请确保使用半自动模式(position)飞行可以成功,否则其他的自动飞行都无法完成。用户手册的第4章和第5章务必读完。
通过网盘分享的文件:Kerloud树莓派室内光流无人机用户手册(v2)-20251114.pdf
链接: 百度网盘 请输入提取码 提取码: n8it 复制这段内容后打开百度网盘手机App,操作更方便哦