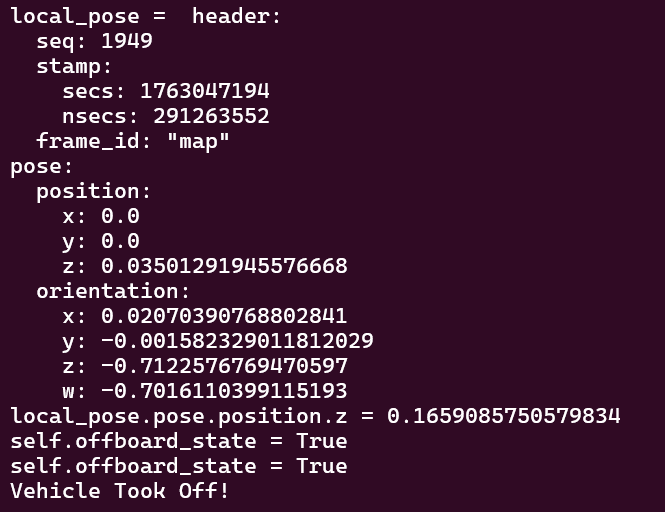
什么都没变运行,有的时候会报错说local_pose.pose是none,有的时候会说local_pose.pose.z<0.1然后起飞失败,有的时候发送起飞成功的信息但是还是没飞起来
而且无人机转速很快导致耗电很快,请问能不能在机载电脑的工作区设置
你好,你这个情况比较复杂,需要核查下:
- 在室内还是室外飞行?如果是室内,地面纹理怎样?光流对地面纹理比较敏感,需要棋盘格的垫子为佳
- 有没有使用半自动模式成功飞行过?
- 在执行程序前请核查定位已经完成,比如可以通过遥控器切换position模式成功
4.如果需要非常稳定和精确的室内导航飞行,可以考虑架设UWB基站,这个要看应用要求来定
sp
这个转速很快指的是什么时候?注意安全
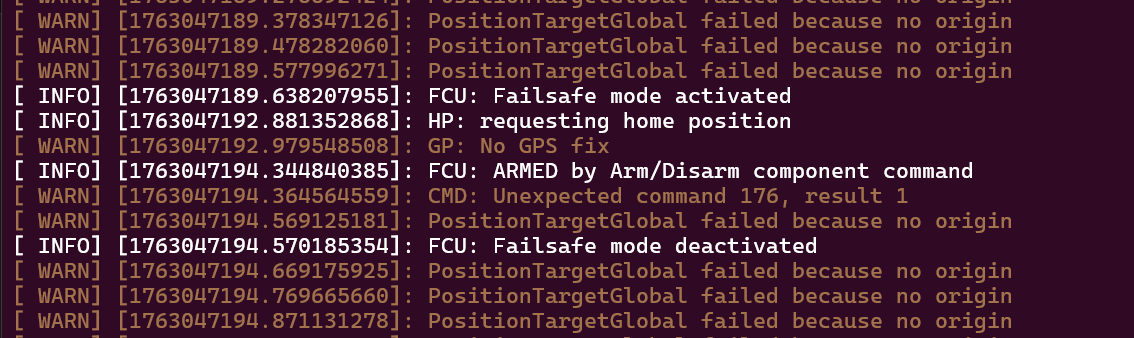
这个图片显示定位还没有完成
光流定位在着陆时如果地面光线或者纹理不好时,定位是无法完成的,请注意下
环境布置要求请看下这里的视频2,有个黑白格纹理布
如果对环境设置没有把握,可以先在室外测试,更安全些,一般外面的水泥路是可以光流飞行的
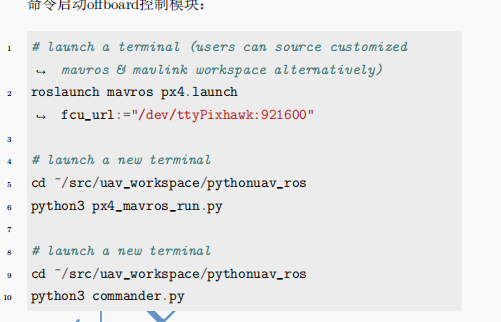
编译commander.py和px4.py启动之后,无人机电机转的很快但是不起飞
是需要地面漫反射好的吗?
参见用户手册4.6节对环境布置的要求说明
看之前提供的信息显示,应该是晚上定位效果不好,晚上时光流传感器下面会有影子,相当于没有纹理了
我想通过qgc的mavlink控制台给无人机发送指令和数据, 是不是需要在树莓派的代码做一些对接?请问可以帮我提供一些思路吗
比如代码里面有没有这种类型的例子
QGC里面的Mavlink指令一般都是直接和飞控进行交互的,如果在机载电脑里进行编程都需要建立局域网,然后通过ssh进行相应的启动。目前产品侧重于用户在ROS的开发。
没有,代码里都是机载电脑里的ROS代码,包括python和C++两种语言
那我想进行室内飞行是不是直接用ssh传输数据和指令就不用qgc了
还有就是请问有没有遥控器的操作方法,我在用户手册没有找到,这个是要在乐迪官网看吗