这个时候一般需要过一会才行,速度融合,等你能用遥控器切换到position模式时你再启动软件。可以写个脚本启动几个Python文件
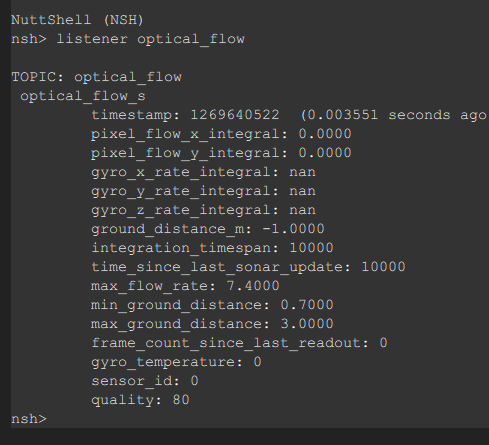
光流正下方不能是纯色吗
纯色就是没有纹理了,在近地时这个定位麻烦一些,要求较多
所以必须等他requesting home position结束之后才能启动软件吗
是不是因为我修改了px4.py让他启动之后不自动升到3.2m了,所以导致离地太近不能定位,才执行不了commander.py的指令
对的,否则定位就没有完成
目前因素就是定位问题,你估计都无法通过遥控器切换到position模式
能切换到position模式了,但是还在requesting position,而且遥控器现在一直嘟嘟嘟的响
1.尝试纹理更好的地面,并保证光线要好,晚上一般效果不够稳定。
2. 遥控器滴滴响代表它的电池没电了
纸张是不是纹理不太好
1.可以淘宝搜索下黑白棋盘格地毯,找一个黑白格尺寸在5cm或以下的。
2.如果需要全天候定位稳定,最好尝试更高级的定位方案,比如在现有机型上加装UWB定位。
https://cloudkernel.cn/kerloud-uav/tutorials_zh/uwb_loco_zh.html#tutorial-uwb-loco-zh
那请问我可以不定位,不用commander.py,就在px4.py里面让他飞一个路线行吗
不行的,没有定位无法控制路径
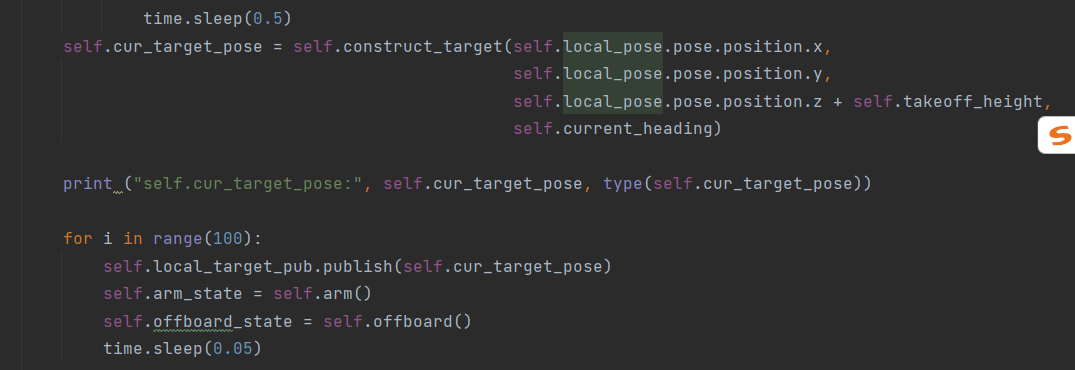
对,没有定位,飞机进入不了offboard模式。无人机的运行逻辑是很严格的,没有位置信息飞机一会就飘了
针对这里提醒的的速度估计不稳定的问题,我们更新了固件,可以通过参数EKF2_OF_PREF(设置为0)关闭对光流融合(包括速度和位置)的准确性判断,但可能会对飞行过程造成一定风险。
您可以自行尝试,在遇到飞行不稳定时请及时让飞手切换到stabilized模式进行控制。
请通过我们发布的windows11地面站进行升级固件,同时对加速度计和陀螺仪进行严格的校准(放在桌面和墙面上)。光流无人机对imu传感器的依赖较大。