第一步:准备必要的组件
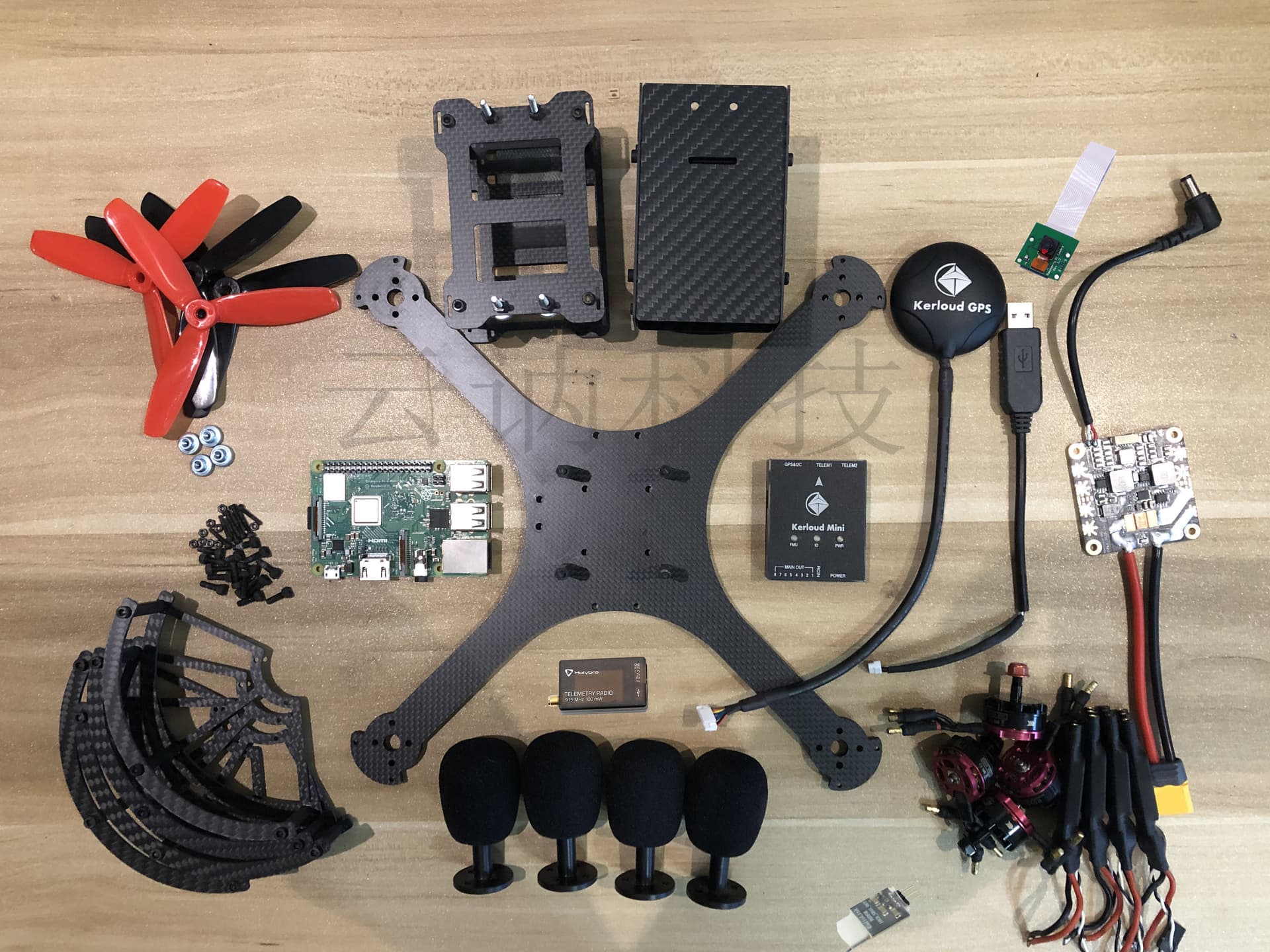
在开始组装之前,您需要准备以下组件:
-
机身:选择一个合适的无人机框架,根据您的需求选择大小和形状(例如四旋翼、六旋翼等),可以选择我们的Kerloud 300无人机机身。
-
电机和螺旋桨:根据框架的大小和重量选择适当数量的电机和螺旋桨。
-
电子调速器(ESC):每个电机需要一个ESC来控制其速度。
-
飞行控制器:Kerloud mini飞控一台
-
电池和充电器:选择适合您无人机的电池,通常是锂聚合物(LiPo)电池。
-
遥控器和接收器:可以选择入门等级的乐迪遥控器。
-
GPS模块:用于定位和导航,Kerloud 飞控自带。
-
数传通信模块:可以选择Kerloud Telemetry。
-
其他配件:如起落架,防震垫,电线和连接器等。
第二步:组装无人机框架
- 安装电机到框架上,并确保它们正确对齐。
- 将螺旋桨安装到电机上,注意不要过紧。
第三步:安装电子组件
- 将ESC连接到每个电机。
- 将飞行控制器安装在框架的中心,使用防震垫以减少震动。
- 连接GPS模块和遥测单元到飞行控制器。
- 将电池连接到电源分配板或直接连接到ESC。
第四步:连接遥控器和接收器
- 将接收器连接到飞行控制器。
- 根据遥控器和接收器的说明书进行配对和设置。
第五步:软件设置
- 下载并安装PX4固件到飞行控制器。
- 使用QGroundControl或其他兼容软件进行飞行模式、GPS、遥测等设置。
- 进行校准,包括加速度计、陀螺仪、磁力计和ESC。
详细设置过程参考:http://cloudkernel-tech.gitee.io/kerloud-autopilot/basicsetup_zh/
第六步:测试与调整
- 在安全区域进行地面测试,检查所有控制是否正常。
- 进行短距离的试飞,逐步增加飞行距离和高度。
- 根据测试结果进行调整,确保所有系统正常运行。
第七步:安全检查和飞行
- 每次飞行前进行全面的安全检查。
- 遵守当地法律和规定,确保安全飞行。
通过遵循这些步骤,您应该能够成功组装并飞行一个带有PX4自动驾驶仪的无人机。重要的是在整个过程中保持耐心,仔细检查每一步,以确保安全和成功的飞行体验。
回到教程目录:Kerloud飞控系列教程(1):目录