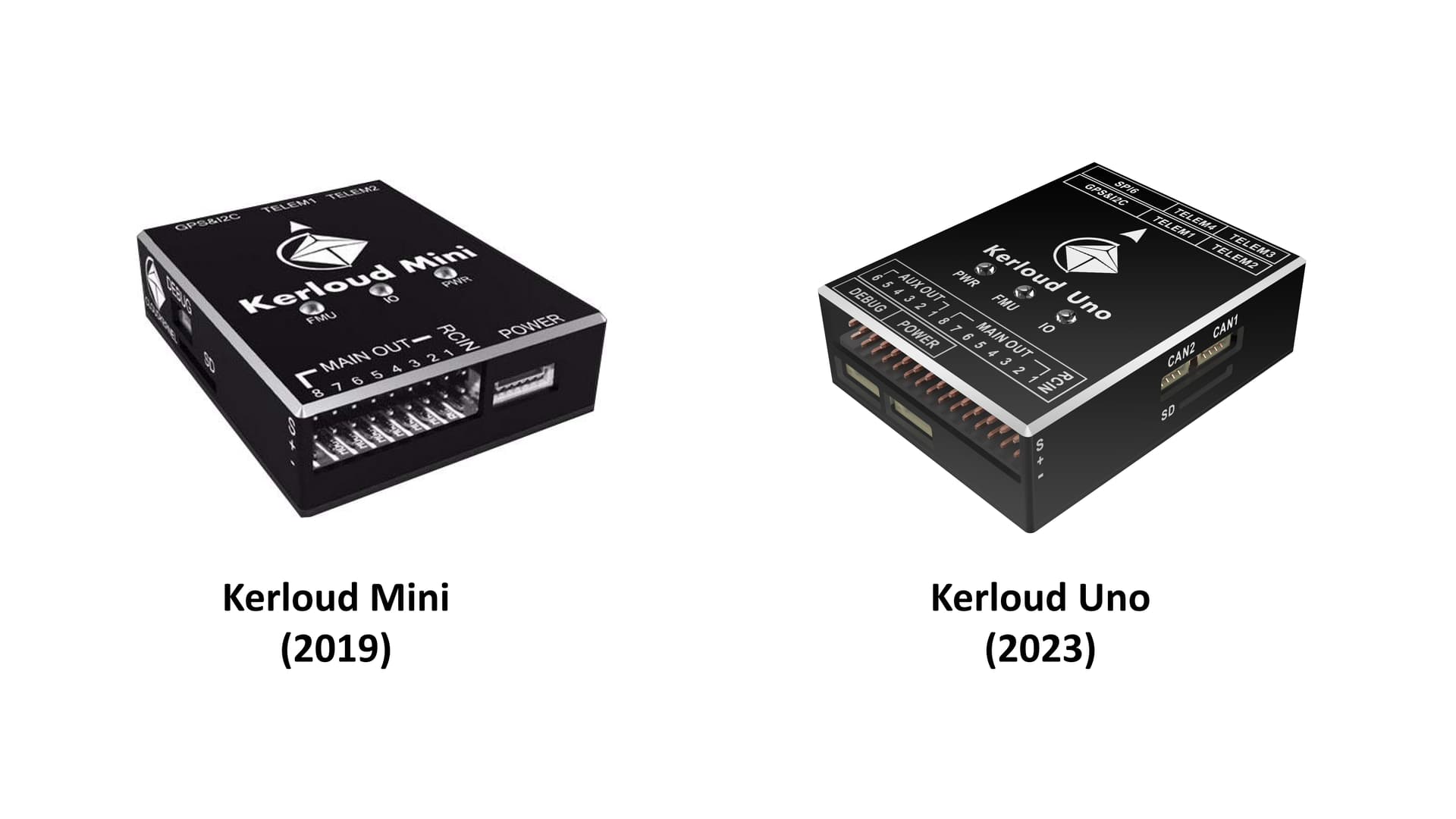
云讷科技 Kerloud 系列飞控目前支持Kerloud Mini、Kerloud Uno两种规格,分别基于pixhawk FMUv3(STM32F4主控)、FMUv6(STM32H7主控)硬件框架设计,面向不同算力、接口需求的使用场合。
此帖为Kerloud系列飞控FAQ汇总,用户常见问题可在此获取解答。
Q1. 产品文档?
A:https://cloudkernel.cn/kerloud-autopilot/
受gitee page影响,2024年5月后飞控文档迁移到官方网站。
Q2. 飞控关键参数?
A:详细参数见产品在线文档“硬件选项”章节:
https://cloudkernel.cn/kerloud-autopilot/hardware_zh/
Q3. 飞控尺寸
A:
Kerloud Mini,57mm×45mm×14.6mm;
Kerloud UNO,57mm×45mm×18.7mm。
Q4. 与Pixhawk差异?
A:
Pixhawk为PX4官方支持硬件平台,近年来由于芯片缺货、硬件升级等因素,该系列硬件产品及对应的固件迭代较为频繁,会对使用者的开发、维护工作造成一定影响。
Kerloud 系列飞控支持PX4固件,硬件原理、端口等设计遵循Pixhawk硬件标准,开源社群软件工具及外围配件可以直接使用。云讷科技在硬件和软件方面提供长期支持,每个Kerloud 飞控版本至少可以有5年的产品寿命,为客户提供稳定的供应保障,最大限度降低版本迭代引入的额外开发成本。
Q5. 是否支持Qgroundcontrol地面站?
A:是,Kerloud 系列飞控支持PX4官方全套开发、仿真、操作环境。
Q6. 是否支持APM固件?
A:Kerloud Mini 2022年及之前出货版本支持APM固件,操作指引链接如下
https://blog.csdn.net/coolkesword/article/details/113482944?spm=1001.2014.3001.5502
Kerloud Mini 2023年之后版本及Kerloud UNO,当前仅支持PX4。如需使用APM固件,请联系云讷科技官方获取相关支持。
Q7. 固件如何更改?
A:
Kerloud飞控的传感器和官方硬件版本有一定区别,需要使用我们维护的LTS版本,参考链接为:
https://cloudkernel.cn/kerloud-autopilot/advanceddev_zh/
用户可以直接从下述百度云链接下载我们编译好的固件和源码,
链接: https://pan.baidu.com/s/1PT0UtT32FRztpqFXrdPyFQ 提取码: trwj
Q8. 装机是否有注意事项?
A:Kerloud 系列飞控没有内部隔振设计,用户安装时需注意外部隔振。用户可使用产品附带的3M隔振棉,纵向粘在飞控下方中间位置即可,参考照片如下:

Q9. 室外飞行定位精度?
A:GPS定位精度为米级,室外飞行需在空旷环境下进行。正常情况下GPS会在上电后3-5分钟锁星并伴随声光提示(GPS上呼吸灯变绿)。
若用户需要更高级别室外飞行精度,可考虑RTK定位方式(厘米级),关于RTK模块购买及使用,请联系云讷科技官方获取相关支持。
Q10. 深度开发及定制支持?
A:用户若在开发中遇到深度技术问题,以及其他定制开发需求,可联系论坛管理员及时获取支持。