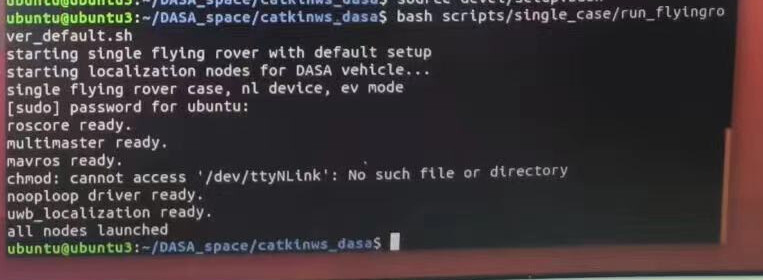
首先检查下UWB模块到机载电脑的usb连接是否松动,如果可以重新插拔一下。
DASA机器在出厂时已经经过定位测试,/dev/ttyNLink对应的是uwb模块的usb端口
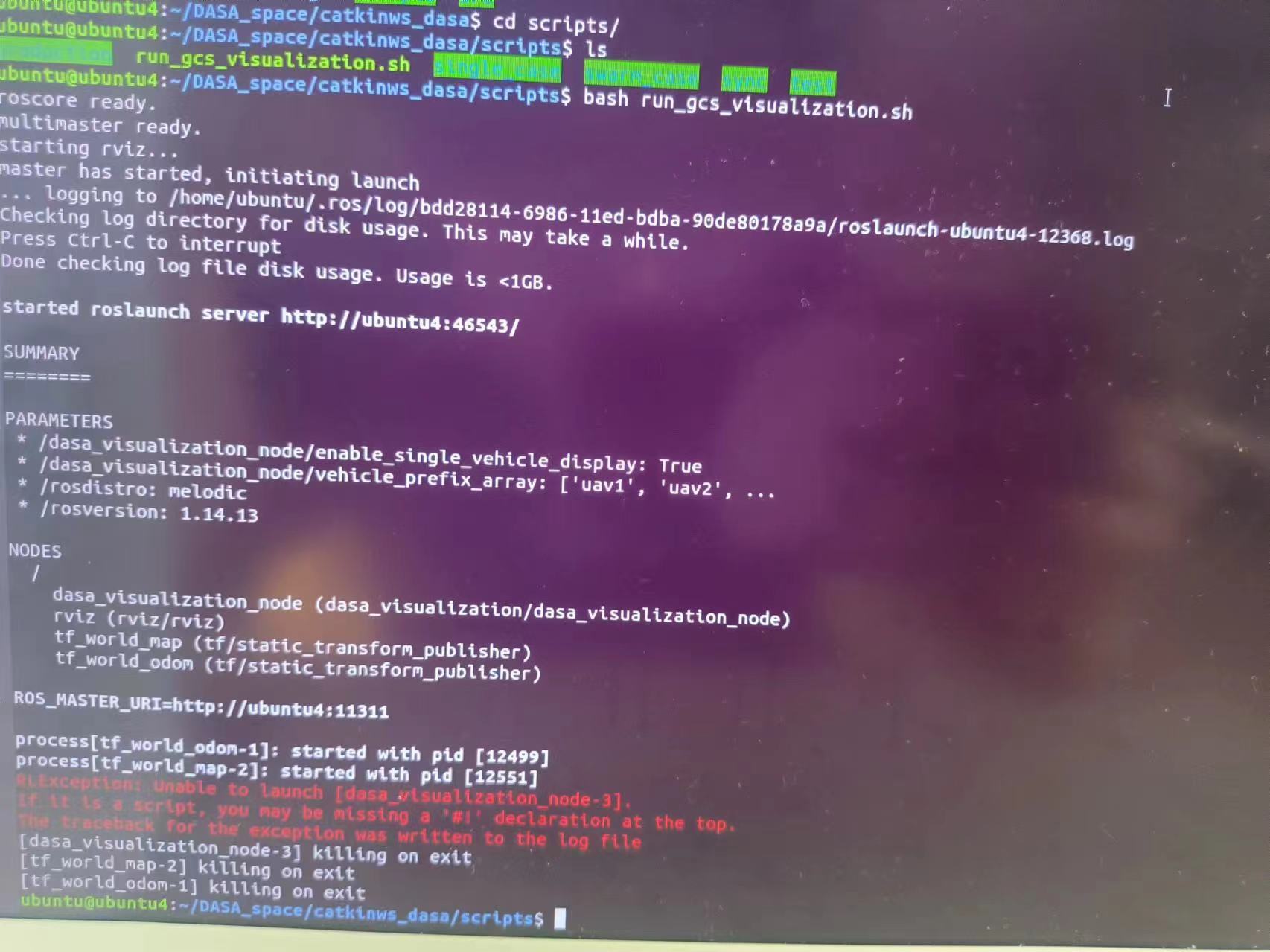
run_gcs_visualization.sh是运行在DASA计算机(或者DASA优盘的电脑端),不在机器端运行。
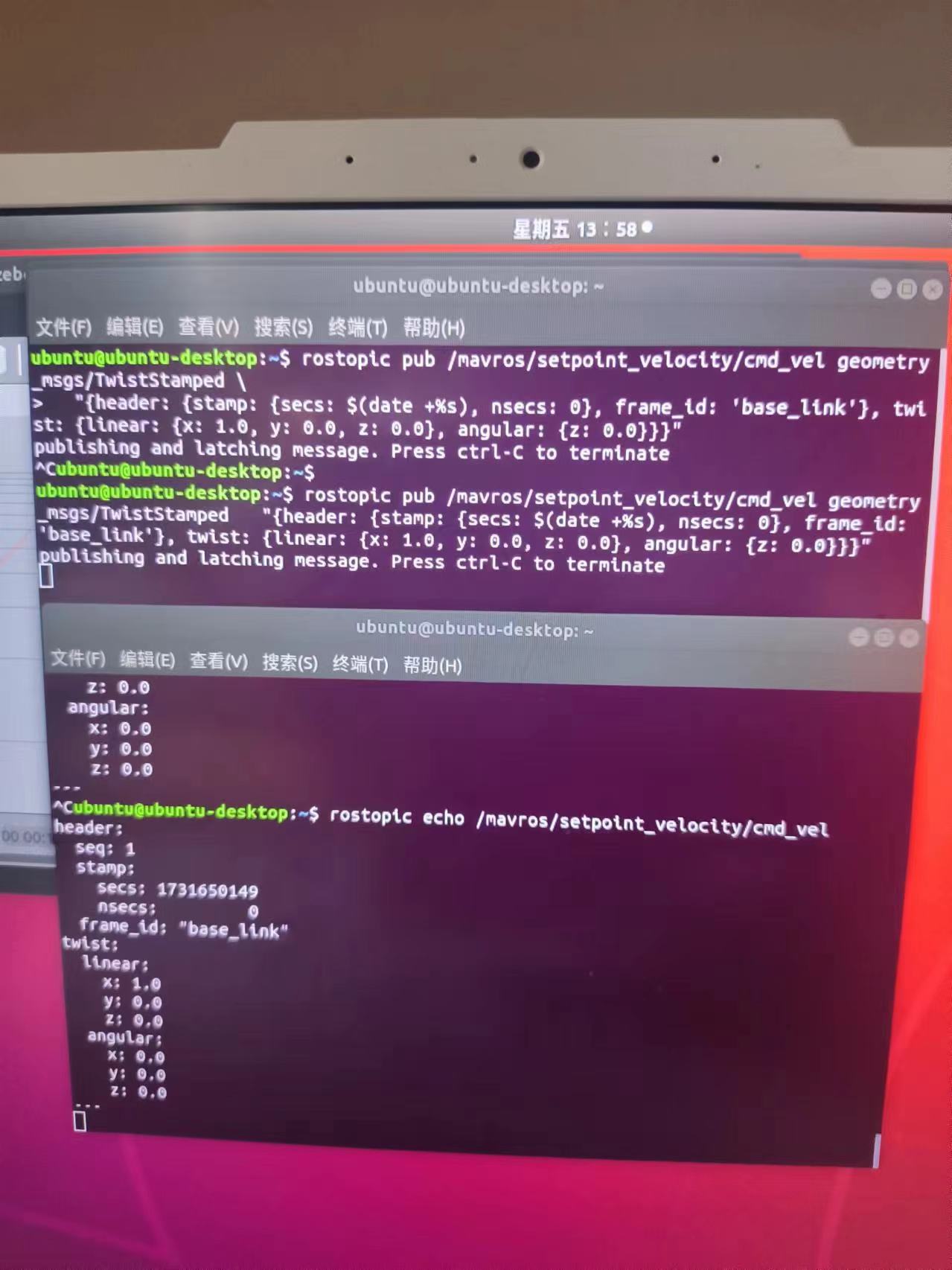
rostopic pub /mavros/setpoint_position/local geometry_msgs/PoseStamped ‘{header: {stamp: now, frame_id: “map”}, pose: {position: {x: 1.0, y: 1.0, z: 1.0}, orientation: {w: 1.0}}}’
在定位做好后使用话题就可以让无人飞车指定位置移动了吧
- 先在仿真环境里熟悉代码(7.8.4章节和7.9.5章节)
- 在实验环境,首先确保安全,实现手动驾驶(参见7.6章节),最后才是飞行(需要飞手保障)
- 自动飞行/驾驶前一定要知道自己在干啥,做到肌肉反应再操作,案例代码都是完整飞行和驾驶的,飞车实验时建议关闭其中的飞行代码部分
你这种情况证明对代码不熟悉,内心存在很大疑问,不要做实验,先在仿真中玩吧
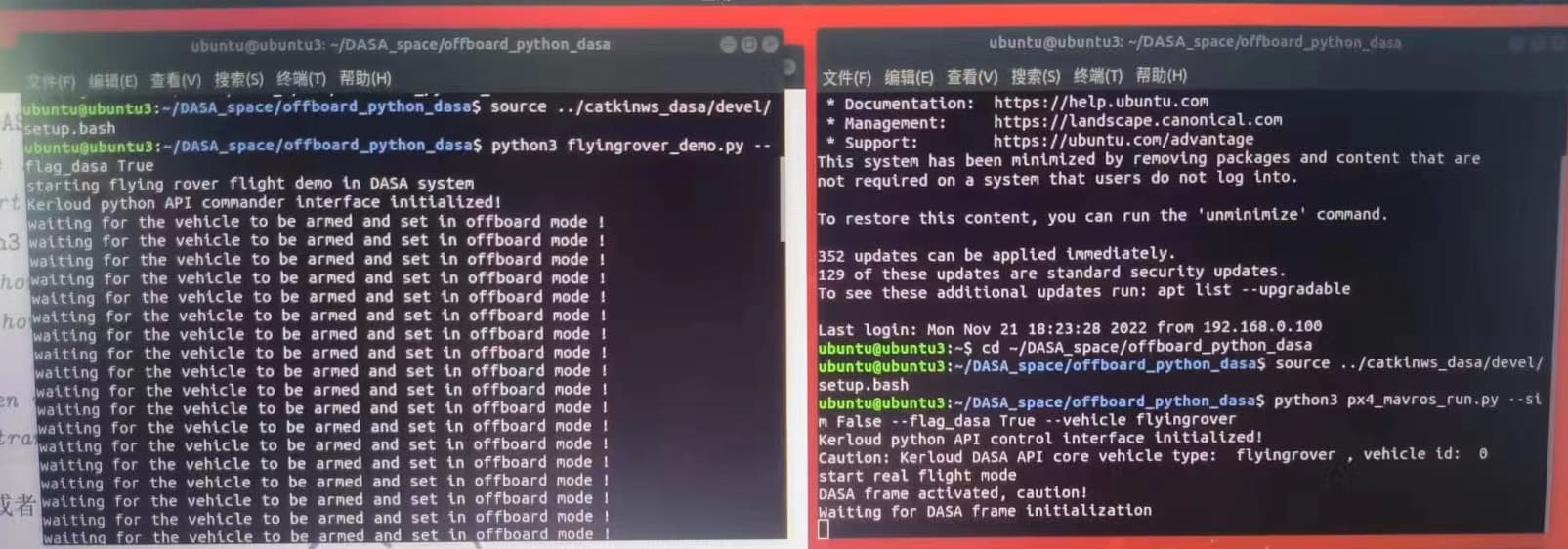
虚拟仿真做过了,代码也都看了,还是出不来,能不能出个视频教程呢,就是把run_flying_rover_default运行起来
所有的功夫都在看代码,这个功夫避不开的
你需要给它解锁arm才行,参考python 代码
我看用户手册说“对于仿真模式的情况,程序将会自动解锁机体并切换到offboard在
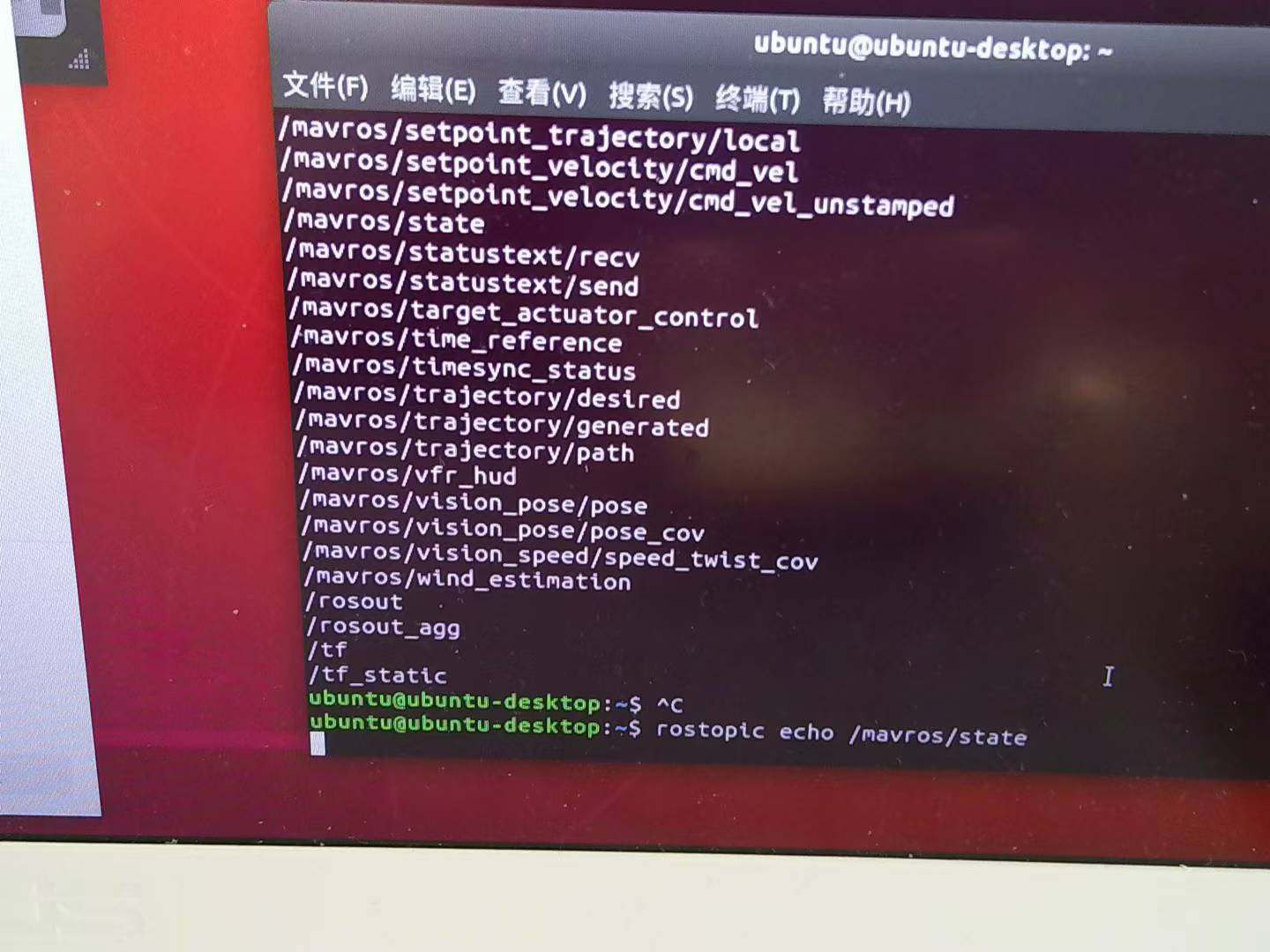
线控制模式"。还需要解锁吗?然后我输入rostopic echo /mavros/state时请问为什么一直没有消息弹出?谢谢您
请详细说明下你执行了什么操作,然后再提问题,谢谢
是这样的,我运行了无人车和无人机虚拟仿真的脚本,就是start_uav_default.sh,然后我之前询问的意思是我通过位置话题想要控制无人机,但是没有反应,然后您说需要解锁,我看用户手册说虚拟仿真自动默认解锁的,所以我想要问接下来应该怎么解决,rostopic mavros/state应该是可以查看无人机状态的吧?
请参考用户手册7.8.4章节说明:
bash scripts/start_uav_sitl_demo.sh
不好意思,上面我说错了,我运行的就是这个脚本,然后下面出现mavros/state没有结果的问题还有虚拟仿真控制无人机是否需要解锁
建议关机重启,没有消息输出代表SITL虚拟仿真没有正确启动,请通过screen指令排查启动进程的情况