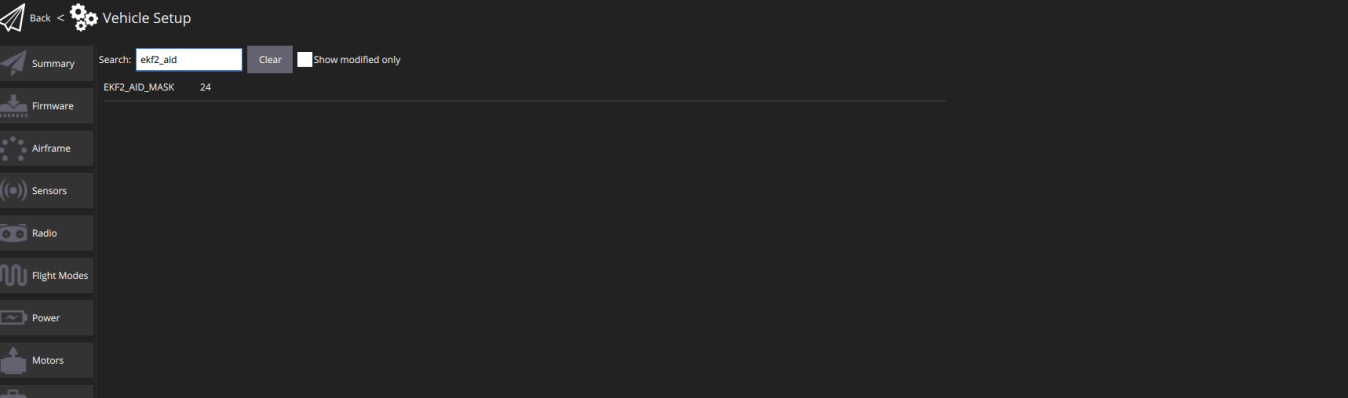
按照指引修改飞控参数后,
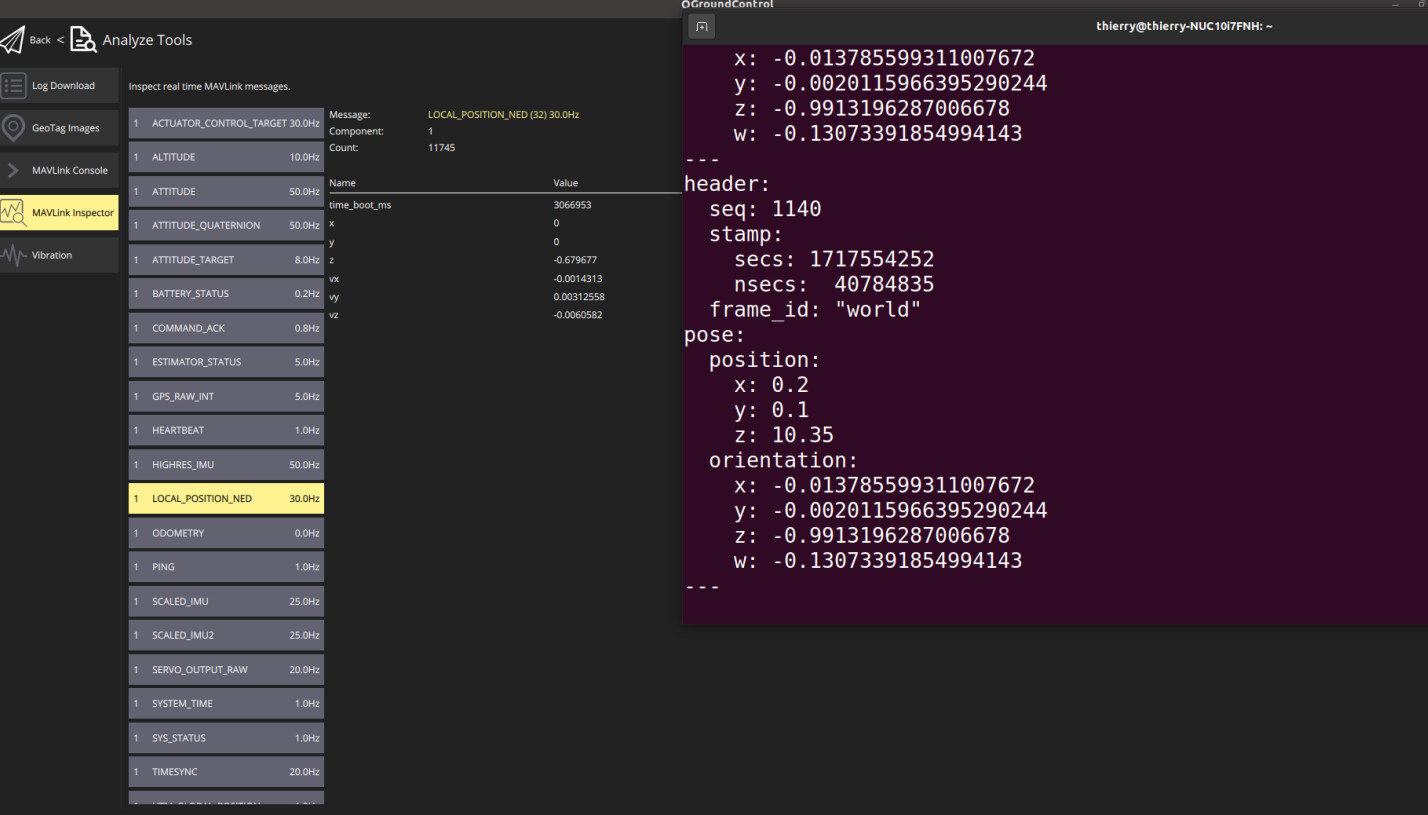
无人机的显示的位姿和提供的视觉位姿差距过大,疑似没有融合成功
终端打印的是mavros/vision_pose/pose,
dasa
2
您需要看下px4 ekf中的详细代码来理解视觉定位到融合的过程,这部分比较复杂。如果您购买我们跟踪相机机型,则可以获取对应服务(技术文档和软件等)。
我们采购的是室外版的,kerloud无人机室外版的支持自己改装成使用视觉定位吗,我们这边需要测试我们自己的slam算法
dasa
4
支持的,只是具体细节需要您研究或者采购我们的服务了,或者参考下述链接