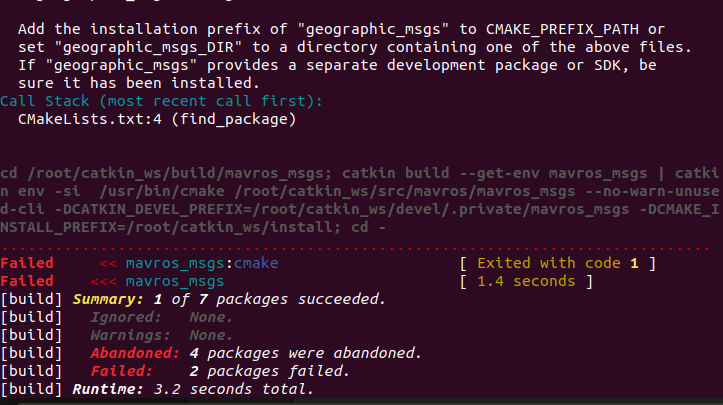
sudo apt install ros-melodic-geographic-msgs
该命令应可以,您需要先安装ros melodic完整版
user@ubuntu:~/Firmware/Tools/setup/custom$ bash ubuntu_sim_ros_melodic.sh
we have to run ubuntu_sim_common_deps first, use downloaded script here!
Remove modemmanager
Reading package lists... Done
Building dependency tree
Reading state information... Done
Package 'modemmanager' is not installed, so not removed
You might want to run 'apt --fix-broken install' to correct these.
The following packages have unmet dependencies:
code : Depends: libc6 (>= 2.28) but 2.27-3ubuntu1.6 is to be installed
Depends: libgssapi-krb5-2 (>= 1.17) but 1.16-2ubuntu0.4 is to be installed
Depends: libxkbfile1 (>= 1:1.1.0) but 1:1.0.9-2 is to be installed
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution).
Add user to dialout group for serial port access (reboot required)
Installing common dependencies
Ign:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic InRelease
Hit:2 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu bionic InRelease
Hit:3 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic Release
Hit:5 http://packages.osrfoundation.org/gazebo/ubuntu-stable bionic InRelease
Hit:6 http://packages.ros.org/ros/ubuntu bionic InRelease
Hit:7 http://us.archive.ubuntu.com/ubuntu bionic InRelease
Hit:8 http://security.ubuntu.com/ubuntu bionic-security InRelease
Hit:9 http://us.archive.ubuntu.com/ubuntu bionic-updates InRelease
Hit:10 http://us.archive.ubuntu.com/ubuntu bionic-backports InRelease
Reading package lists... Done
Reading package lists... Done
Building dependency tree
Reading state information... Done
Note, selecting 'libimage-exiftool-perl' instead of 'exiftool'
build-essential is already the newest version (12.4ubuntu1).
zip is already the newest version (3.0-11build1).
astyle is already the newest version (3.1-1ubuntu2).
genromfs is already the newest version (0.5.2-2build3).
ninja-build is already the newest version (1.8.2-1).
cmake is already the newest version (3.10.2-1ubuntu2.18.04.2).
git is already the newest version (1:2.17.1-1ubuntu0.18).
libimage-exiftool-perl is already the newest version (10.80-1ubuntu0.1).
You might want to run 'apt --fix-broken install' to correct these.
The following packages have unmet dependencies:
code : Depends: libc6 (>= 2.28) but 2.27-3ubuntu1.6 is to be installed
Depends: libgssapi-krb5-2 (>= 1.17) but 1.16-2ubuntu0.4 is to be installed
Depends: libxkbfile1 (>= 1:1.1.0) but 1:1.0.9-2 is to be installed
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution).
/usr/bin/xxd
Reading package lists... Done
Building dependency tree
Reading state information... Done
Note, selecting 'libpython2.7-stdlib' instead of 'python-argparse'
python-dev is already the newest version (2.7.15~rc1-1).
python-numpy is already the newest version (1:1.13.3-2ubuntu1).
python-empy is already the newest version (3.3.2-1build1).
python-toml is already the newest version (0.9.3-1).
libpython2.7-stdlib is already the newest version (2.7.17-1~18.04ubuntu1.11).
python-pip is already the newest version (9.0.1-2.3~ubuntu1.18.04.8).
You might want to run 'apt --fix-broken install' to correct these.
The following packages have unmet dependencies:
code : Depends: libc6 (>= 2.28) but 2.27-3ubuntu1.6 is to be installed
Depends: libgssapi-krb5-2 (>= 1.17) but 1.16-2ubuntu0.4 is to be installed
Depends: libxkbfile1 (>= 1:1.1.0) but 1:1.0.9-2 is to be installed
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution).
DEPRECATION: Python 2.7 reached the end of its life on January 1st, 2020. Please upgrade your Python as Python 2.7 is no longer maintained. pip 21.0 will drop support for Python 2.7 in January 2021. More details about Python 2 support in pip can be found at https://pip.pypa.io/en/latest/development/release-process/#python-2-support pip 21.0 will remove support for this functionality.
Looking in indexes: https://pypi.tuna.tsinghua.edu.cn/simple
Requirement already up-to-date: pip in /usr/local/lib/python2.7/dist-packages (20.3.4)
WARNING: You are using pip version 20.3.4; however, version 21.3.1 is available.
You should consider upgrading via the '/usr/bin/python2 -m pip install --upgrade pip' command.
DEPRECATION: Python 2.7 reached the end of its life on January 1st, 2020. Please upgrade your Python as Python 2.7 is no longer maintained. pip 21.0 will drop support for Python 2.7 in January 2021. More details about Python 2 support in pip can be found at https://pip.pypa.io/en/latest/development/release-process/#python-2-support pip 21.0 will remove support for this functionality.
Looking in indexes: https://pypi.tuna.tsinghua.edu.cn/simple
Requirement already satisfied: pandas in /usr/local/lib/python2.7/dist-packages (0.24.2)
Requirement already satisfied: jinja2 in /usr/local/lib/python2.7/dist-packages (2.11.3)
Requirement already satisfied: pyserial in /usr/local/lib/python2.7/dist-packages (3.5)
Requirement already satisfied: pyyaml in /usr/local/lib/python2.7/dist-packages (5.4.1)
Requirement already satisfied: numpy>=1.12.0 in /usr/lib/python2.7/dist-packages (from pandas) (1.13.3)
Requirement already satisfied: python-dateutil>=2.5.0 in /usr/local/lib/python2.7/dist-packages (from pandas) (2.9.0.post0)
Requirement already satisfied: pytz>=2011k in /usr/local/lib/python2.7/dist-packages (from pandas) (2024.1)
Requirement already satisfied: MarkupSafe>=0.23 in /usr/local/lib/python2.7/dist-packages (from jinja2) (1.1.1)
Requirement already satisfied: six>=1.5 in /usr/local/lib/python2.7/dist-packages (from python-dateutil>=2.5.0->pandas) (1.16.0)
WARNING: You are using pip version 20.3.4; however, version 21.3.1 is available.
You should consider upgrading via the '/usr/bin/python2 -m pip install --upgrade pip' command.
DEPRECATION: Python 2.7 reached the end of its life on January 1st, 2020. Please upgrade your Python as Python 2.7 is no longer maintained. pip 21.0 will drop support for Python 2.7 in January 2021. More details about Python 2 support in pip can be found at https://pip.pypa.io/en/latest/development/release-process/#python-2-support pip 21.0 will remove support for this functionality.
Looking in indexes: https://pypi.tuna.tsinghua.edu.cn/simple
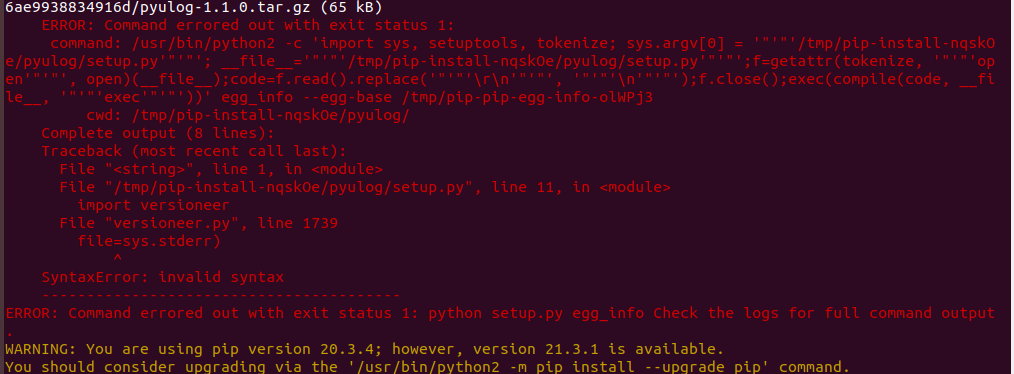
Collecting pyulog
Using cached https://pypi.tuna.tsinghua.edu.cn/packages/c2/6c/dea17a45219681dc111590b63a14cc0b1a49773b4312546ae9938834916d/pyulog-1.1.0.tar.gz (65 kB)
ERROR: Command errored out with exit status 1:
command: /usr/bin/python2 -c 'import sys, setuptools, tokenize; sys.argv[0] = '"'"'/tmp/pip-install-WqlGis/pyulog/setup.py'"'"'; __file__='"'"'/tmp/pip-install-WqlGis/pyulog/setup.py'"'"';f=getattr(tokenize, '"'"'open'"'"', open)(__file__);code=f.read().replace('"'"'\r\n'"'"', '"'"'\n'"'"');f.close();exec(compile(code, __file__, '"'"'exec'"'"'))' egg_info --egg-base /tmp/pip-pip-egg-info-jA8v_0
cwd: /tmp/pip-install-WqlGis/pyulog/
Complete output (8 lines):
Traceback (most recent call last):
File "<string>", line 1, in <module>
File "/tmp/pip-install-WqlGis/pyulog/setup.py", line 11, in <module>
import versioneer
File "versioneer.py", line 1739
file=sys.stderr)
^
SyntaxError: invalid syntax
----------------------------------------
ERROR: Command errored out with exit status 1: python setup.py egg_info Check the logs for full command output.
WARNING: You are using pip version 20.3.4; however, version 21.3.1 is available.
You should consider upgrading via the '/usr/bin/python2 -m pip install --upgrade pip' command.
Installing jMAVSim simulator dependencies
Reading package lists... Done
Building dependency tree
Reading state information... Done
ant is already the newest version (1.10.5-3~18.04).
openjdk-8-jdk is already the newest version (8u372-ga~us1-0ubuntu1~18.04).
openjdk-8-jre is already the newest version (8u372-ga~us1-0ubuntu1~18.04).
You might want to run 'apt --fix-broken install' to correct these.
The following packages have unmet dependencies:
code : Depends: libc6 (>= 2.28) but 2.27-3ubuntu1.6 is to be installed
Depends: libgssapi-krb5-2 (>= 1.17) but 1.16-2ubuntu0.4 is to be installed
Depends: libxkbfile1 (>= 1:1.1.0) but 1:1.0.9-2 is to be installed
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution).
change pip install source to tsinghua mirror
DEPRECATION: Python 2.7 reached the end of its life on January 1st, 2020. Please upgrade your Python as Python 2.7 is no longer maintained. pip 21.0 will drop support for Python 2.7 in January 2021. More details about Python 2 support in pip can be found at https://pip.pypa.io/en/latest/development/release-process/#python-2-support pip 21.0 will remove support for this functionality.
Writing to /home/user/.config/pip/pip.conf
Reading package lists... Done
Building dependency tree
Reading state information... Done
libeigen3-dev is already the newest version (3.3.4-4).
libopencv-dev is already the newest version (3.2.0+dfsg-4ubuntu0.1).
protobuf-compiler is already the newest version (3.0.0-9.1ubuntu1.1).
You might want to run 'apt --fix-broken install' to correct these.
The following packages have unmet dependencies:
code : Depends: libc6 (>= 2.28) but 2.27-3ubuntu1.6 is to be installed
Depends: libgssapi-krb5-2 (>= 1.17) but 1.16-2ubuntu0.4 is to be installed
Depends: libxkbfile1 (>= 1:1.1.0) but 1:1.0.9-2 is to be installed
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution).
Executing: /tmp/apt-key-gpghome.hZds4q0s6y/gpg.1.sh --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
gpg: key F42ED6FBAB17C654: "Open Robotics <info@osrfoundation.org>" 1 signature cleaned
gpg: Total number processed: 1
gpg: signatures cleaned: 1
Ign:1 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic InRelease
Hit:2 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu bionic InRelease
Hit:3 http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu bionic Release
Hit:5 http://packages.osrfoundation.org/gazebo/ubuntu-stable bionic InRelease
Hit:6 http://packages.ros.org/ros/ubuntu bionic InRelease
Hit:7 http://us.archive.ubuntu.com/ubuntu bionic InRelease
Hit:8 http://security.ubuntu.com/ubuntu bionic-security InRelease
Hit:9 http://us.archive.ubuntu.com/ubuntu bionic-updates InRelease
Hit:10 http://us.archive.ubuntu.com/ubuntu bionic-backports InRelease
Reading package lists... Done
Reading package lists... Done
Building dependency tree
Reading state information... Done
ros-melodic-desktop-full is already the newest version (1.4.1-0bionic.20230620.175308).
You might want to run 'apt --fix-broken install' to correct these.
The following packages have unmet dependencies:
code : Depends: libc6 (>= 2.28) but 2.27-3ubuntu1.6 is to be installed
Depends: libgssapi-krb5-2 (>= 1.17) but 1.16-2ubuntu0.4 is to be installed
Depends: libxkbfile1 (>= 1:1.1.0) but 1:1.0.9-2 is to be installed
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution).
ERROR: default sources list file already exists:
/etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initialize
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml
Skip end-of-life distro "ardent"
Skip end-of-life distro "bouncy"
Skip end-of-life distro "crystal"
Skip end-of-life distro "dashing"
Skip end-of-life distro "eloquent"
Skip end-of-life distro "foxy"
Skip end-of-life distro "galactic"
Skip end-of-life distro "groovy"
Add distro "humble"
Skip end-of-life distro "hydro"
Skip end-of-life distro "indigo"
Add distro "iron"
Skip end-of-life distro "jade"
Skip end-of-life distro "kinetic"
Skip end-of-life distro "lunar"
Skip end-of-life distro "melodic"
Add distro "noetic"
Add distro "rolling"
updated cache in /home/user/.ros/rosdep/sources.cache
ROS setup.bash already in .bashrc
Reading package lists... Done
Building dependency tree
Reading state information... Done
build-essential is already the newest version (12.4ubuntu1).
python-rosdep is already the newest version (0.22.2-1).
python-rosinstall is already the newest version (0.7.8-1).
python-rosinstall-generator is already the newest version (0.1.23-1).
python-wstool is already the newest version (0.1.17-1).
You might want to run 'apt --fix-broken install' to correct these.
The following packages have unmet dependencies:
code : Depends: libc6 (>= 2.28) but 2.27-3ubuntu1.6 is to be installed
Depends: libgssapi-krb5-2 (>= 1.17) but 1.16-2ubuntu0.4 is to be installed
Depends: libxkbfile1 (>= 1:1.1.0) but 1:1.0.9-2 is to be installed
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution).
Reading package lists... Done
Building dependency tree
Reading state information... Done
python-catkin-tools is already the newest version (0.6.1-1).
python-rosinstall-generator is already the newest version (0.1.23-1).
You might want to run 'apt --fix-broken install' to correct these.
The following packages have unmet dependencies:
code : Depends: libc6 (>= 2.28) but 2.27-3ubuntu1.6 is to be installed
Depends: libgssapi-krb5-2 (>= 1.17) but 1.16-2ubuntu0.4 is to be installed
Depends: libxkbfile1 (>= 1:1.1.0) but 1:1.0.9-2 is to be installed
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution).
Catkin workspace `/home/user/catkin_ws` is already initialized. No action taken.
---------------------------------------------------------
Profile: default
Extending: [cached] /opt/ros/melodic
Workspace: /home/user/catkin_ws
---------------------------------------------------------
Build Space: [exists] /home/user/catkin_ws/build
Devel Space: [exists] /home/user/catkin_ws/devel
Install Space: [unused] /home/user/catkin_ws/install
Log Space: [exists] /home/user/catkin_ws/logs
Source Space: [exists] /home/user/catkin_ws/src
DESTDIR: [unused] None
---------------------------------------------------------
Devel Space Layout: linked
Install Space Layout: None
---------------------------------------------------------
Additional CMake Args: None
Additional Make Args: None
Additional catkin Make Args: None
Internal Make Job Server: True
Cache Job Environments: False
---------------------------------------------------------
Whitelisted Packages: None
Blacklisted Packages: None
---------------------------------------------------------
Workspace configuration appears valid.
---------------------------------------------------------
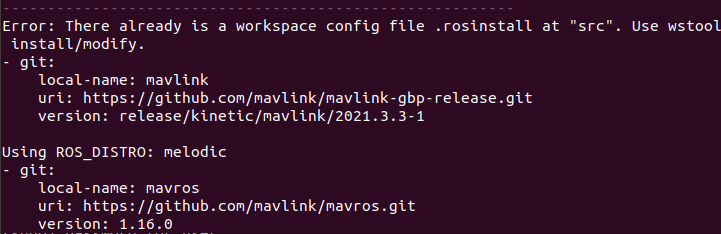
Error: There already is a workspace config file .rosinstall at "src". Use wstool install/modify.
- git:
local-name: mavlink
uri: https://github.com/mavlink/mavlink-gbp-release.git
version: release/kinetic/mavlink/2021.3.3-1
Using ROS_DISTRO: melodic
- git:
local-name: mavros
uri: https://github.com/mavlink/mavros.git
version: 1.16.0
/usr/lib/python2.7/dist-packages/wstool/config_yaml.py:74: YAMLLoadWarning: calling yaml.load() without Loader=... is deprecated, as the default Loader is unsafe. Please read https://msg.pyyaml.org/load for full details.
yamldata = yaml.load(stream)
Merge caused no change, no new elements found
/usr/lib/python2.7/dist-packages/wstool/config_yaml.py:74: YAMLLoadWarning: calling yaml.load() without Loader=... is deprecated, as the default Loader is unsafe. Please read https://msg.pyyaml.org/load for full details.
yamldata = yaml.load(stream)
[mavlink] Updating /home/user/catkin_ws/src/mavlink
[mavlink] Done.
[mavros] Updating /home/user/catkin_ws/src/mavros
[mavros] Done.
executing command [sudo -H apt-get install -y libgeographiclib-dev]
Reading package lists... Done
Building dependency tree
Reading state information... Done
Package libgeographiclib-dev is not available, but is referred to by another package.
This may mean that the package is missing, has been obsoleted, or
is only available from another source
However the following packages replace it:
libgeographic-dev:i386 libgeographic-dev
E: Package 'libgeographiclib-dev' has no installation candidate
ERROR: the following rosdeps failed to install
apt: command [sudo -H apt-get install -y libgeographiclib-dev] failed
executing command [sudo -H apt-get install -y libgeographiclib-dev]
Reading package lists... Done
Building dependency tree
Reading state information... Done
Package libgeographiclib-dev is not available, but is referred to by another package.
This may mean that the package is missing, has been obsoleted, or
is only available from another source
However the following packages replace it:
libgeographic-dev:i386 libgeographic-dev
E: Package 'libgeographiclib-dev' has no installation candidate
ERROR: the following rosdeps failed to install
apt: command [sudo -H apt-get install -y libgeographiclib-dev] failed
Reading package lists... Done
Building dependency tree
Reading state information... Done
geographiclib-tools is already the newest version (1.49-2).
You might want to run 'apt --fix-broken install' to correct these.
The following packages have unmet dependencies:
code : Depends: libc6 (>= 2.28) but 2.27-3ubuntu1.6 is to be installed
Depends: libgssapi-krb5-2 (>= 1.17) but 1.16-2ubuntu0.4 is to be installed
Depends: libxkbfile1 (>= 1:1.1.0) but 1:1.0.9-2 is to be installed
E: Unmet dependencies. Try 'apt --fix-broken install' with no packages (or specify a solution).
sudo: .: command not found
---------------------------------------------------------
Profile: default
Extending: [cached] /opt/ros/melodic
Workspace: /home/user/catkin_ws
---------------------------------------------------------
Build Space: [exists] /home/user/catkin_ws/build
Devel Space: [exists] /home/user/catkin_ws/devel
Install Space: [unused] /home/user/catkin_ws/install
Log Space: [exists] /home/user/catkin_ws/logs
Source Space: [exists] /home/user/catkin_ws/src
DESTDIR: [unused] None
---------------------------------------------------------
Devel Space Layout: linked
Install Space Layout: None
---------------------------------------------------------
Additional CMake Args: None
Additional Make Args: None
Additional catkin Make Args: None
Internal Make Job Server: True
Cache Job Environments: False
---------------------------------------------------------
Whitelisted Packages: None
Blacklisted Packages: None
---------------------------------------------------------
Workspace configuration appears valid.
---------------------------------------------------------
[build] Found '6' packages in 0.0 seconds.
[build] Package table is up to date.
Starting >>> mavlink
Starting >>> mavros_msgs
_______________________________________________________________________________
Errors << mavlink:make /home/user/catkin_ws/logs/mavlink/build.make.002.log
Traceback (most recent call last):
File "/home/user/catkin_ws/src/mavlink/pymavlink/tools/mavgen.py", line 16, in <module>
from pymavlink.generator import mavgen
File "/home/user/catkin_ws/src/mavlink/pymavlink/generator/mavgen.py", line 26, in <module>
from future import standard_library
ImportError: No module named future
make[2]: *** [paparazzi-v2.0-cxx-stamp] Error 1
make[1]: *** [CMakeFiles/paparazzi.xml-v2.0.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs....
Traceback (most recent call last):
File "/home/user/catkin_ws/src/mavlink/pymavlink/tools/mavgen.py", line 16, in <module>
from pymavlink.generator import mavgen
File "/home/user/catkin_ws/src/mavlink/pymavlink/generator/mavgen.py", line 26, in <module>
from future import standard_library
ImportError: No module named future
Traceback (most recent call last):
File "/home/user/catkin_ws/src/mavlink/pymavlink/tools/mavgen.py", line 16, in <module>
from pymavlink.generator import mavgen
File "/home/user/catkin_ws/src/mavlink/pymavlink/generator/mavgen.py", line 26, in <module>
from future import standard_library
ImportError: No module named future
Traceback (most recent call last):
File "/home/user/catkin_ws/src/mavlink/pymavlink/tools/mavgen.py", line 16, in <module>
from pymavlink.generator import mavgen
File "/home/user/catkin_ws/src/mavlink/pymavlink/generator/mavgen.py", line 26, in <module>
from future import standard_library
ImportError: No module named future
make[2]: *** [icarous-v2.0-cxx-stamp] Error 1
make[1]: *** [CMakeFiles/icarous.xml-v2.0.dir/all] Error 2
make[2]: *** [include/v1.0/ASLUAV/ASLUAV.h] Error 1
make[1]: *** [CMakeFiles/ASLUAV.xml-v1.0.dir/all] Error 2
Traceback (most recent call last):
File "/home/user/catkin_ws/src/mavlink/pymavlink/tools/mavgen.py", line 16, in <module>
from pymavlink.generator import mavgen
File "/home/user/catkin_ws/src/mavlink/pymavlink/generator/mavgen.py", line 26, in <module>
from future import standard_library
ImportError: No module named future
make[2]: *** [include/v1.0/icarous/icarous.h] Error 1
make[1]: *** [CMakeFiles/icarous.xml-v1.0.dir/all] Error 2
Traceback (most recent call last):
make[2]: *** [matrixpilot-v2.0-cxx-stamp] Error 1
File "/home/user/catkin_ws/src/mavlink/pymavlink/tools/mavgen.py", line 16, in <module>
from pymavlink.generator import mavgen
File "/home/user/catkin_ws/src/mavlink/pymavlink/generator/mavgen.py", line 26, in <module>
from future import standard_library
ImportError: No module named future
make[1]: *** [CMakeFiles/matrixpilot.xml-v2.0.dir/all] Error 2
make[2]: *** [ualberta-v2.0-cxx-stamp] Error 1
make[1]: *** [CMakeFiles/ualberta.xml-v2.0.dir/all] Error 2
Traceback (most recent call last):
File "/home/user/catkin_ws/src/mavlink/pymavlink/tools/mavgen.py", line 16, in <module>
from pymavlink.generator import mavgen
File "/home/user/catkin_ws/src/mavlink/pymavlink/generator/mavgen.py", line 26, in <module>
from future import standard_library
ImportError: No module named future
make[2]: *** [standard-v2.0-cxx-stamp] Error 1
make[1]: *** [CMakeFiles/standard.xml-v2.0.dir/all] Error 2
make: *** [all] Error 2
cd /home/user/catkin_ws/build/mavlink; catkin build --get-env mavlink | catkin env -si /usr/bin/make --jobserver-fds=6,7 -j; cd -
...............................................................................
Failed << mavlink:make [ Exited with code 2 ]
Failed <<< mavlink [ 0.3 seconds ]
Abandoned <<< libmavconn [ Unrelated job failed ]
Abandoned <<< mavros [ Unrelated job failed ]
Abandoned <<< mavros_extras [ Unrelated job failed ]
Abandoned <<< test_mavros [ Unrelated job failed ]
Finished <<< mavros_msgs [ 0.8 seconds ]
[build] Summary: 1 of 6 packages succeeded.
[build] Ignored: None.
[build] Warnings: None.
[build] Abandoned: 4 packages were abandoned.
[build] Failed: 1 packages failed.
[build] Runtime: 0.9 seconds total.
ROS catkin_ws setup.bash already in .bashrc
user@ubuntu:~/Firmware/Tools/setup/custom$ ls >install.txt
user@ubuntu:~/Firmware/Tools/setup/custom$ ls
install_geographiclib_datasets.sh ubuntu.sh
install.txt ubuntu_sim_common_deps.sh
README ubuntu_sim_ros_melodic.sh
requirements.txt
user@ubuntu:~/Firmware/Tools/setup/custom$
你好,感谢你的回复。ros安装完成,但是还是存在问题。
sudo pip install future
您可以根据提示的问题使用bing搜索,一般都有解决方法
对于mavros 包的使用,不需要使用px4中的脚本(未测试过)