大自然是许多现有机器人系统的主要灵感来源,旨在复制各种生物体的外观和行为。通过人工复制生物过程,这些机器人可以帮助更有效地解决复杂的现实世界问题。
浙江理工大学和埃塞克斯大学的研究人员开发了一种受螳螂虾启发的机器人,可以帮助探索和监测狭窄的水下环境,这些环境栖息着众多动物物种,矿产资源丰富。这种仿生机器人发表在IEEE/ASME Transactions on Mechatronics上的一篇论文中。
“许多水下环境的空间狭窄,人类难以进入,因此机器人接管他们的探索是最佳选择,”该论文的作者之一陈刚告诉Tech Xplore。“螳螂虾是海洋环境中灵活快速游动的小型捕食者,其出色的运动能力可以为水下机器人的发展提供新的研究思路。本工作以螳螂虾为仿生对象,设计了一种新的螳螂虾机器人,并完成了其运动控制。
受到螳螂虾的能力和动作的启发,Chen和他的同事们开始人工复制它们。他们的希望是开发一种水下机器人,它可以在水下很好地移动,模仿支持螳螂虾运动的机制,从而也很容易进入水下的狭窄空间。
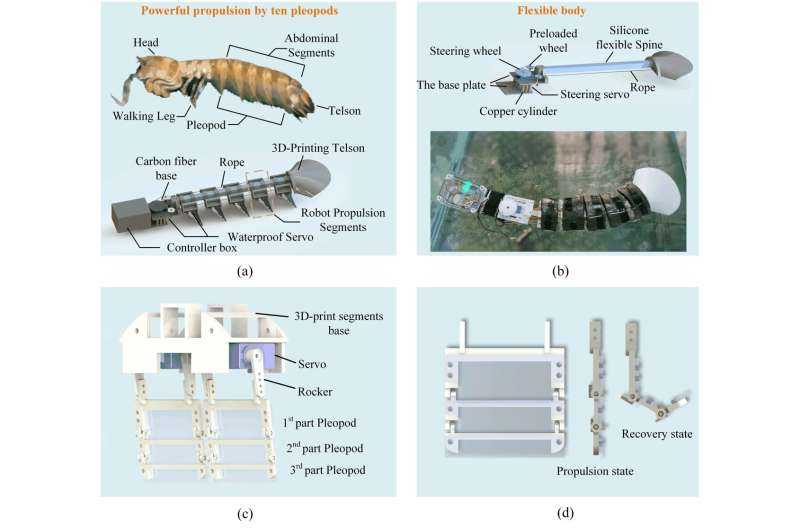
研究人员创造的敏捷机器人由10个人造多足动物和一个灵活的身体组成,具有很强的推进能力。多足类动物是附着在甲壳类动物身体上的叉形肢体,允许动物在水中移动。
“仿生螳螂虾机器人由五对多足类动物驱动,”陈解释说。“通过调整这五对多足类动物的运动频率、振幅和运动的相位差,可以实现速度和稳定性的平衡。此外,每对多足类动物的连接都是独立的,这对于在水下结构损坏的情况下进行修复非常有用。
该团队机器人的运动通过使用电线弯曲其灵活的躯干以及人造多足类动物的运动来控制。总的来说,这些机制允许机器人快速调整其转弯角度,以便它可以沿着所需的方向游泳。
“多个多足类动物是多余的,即使一些多足类动物发生故障,也可以使机器人实现转弯,”陈说。“仿生多足类动物设计有三个关节,其中一个是伺服电机驱动的主动关节,其余两个关节是被动关节,利用水的阻力实现展开和折叠。”
从本质上讲,当机器人的一个肢体向后移动时,它的三个关节会完全展开,从而产生最大的推进力。相反,当肢体回到原来的位置时,关节会折叠,从而减少向前阻力。这种独特的设计利用了与水流相关的特性,简化了机器人的结构,提高了其推进能力,使其更容易在水下进行控制。
“仿生螳螂虾机器人的整体结构参考了生物螳螂虾结构,机器人机身扁平,采用流线型的telson,有效减少阻力,”陈说。“机器人的多足类动物和机身采用刚柔耦合设计,减少水对机器人的影响,提高机器人在水下运动中的稳定性。”
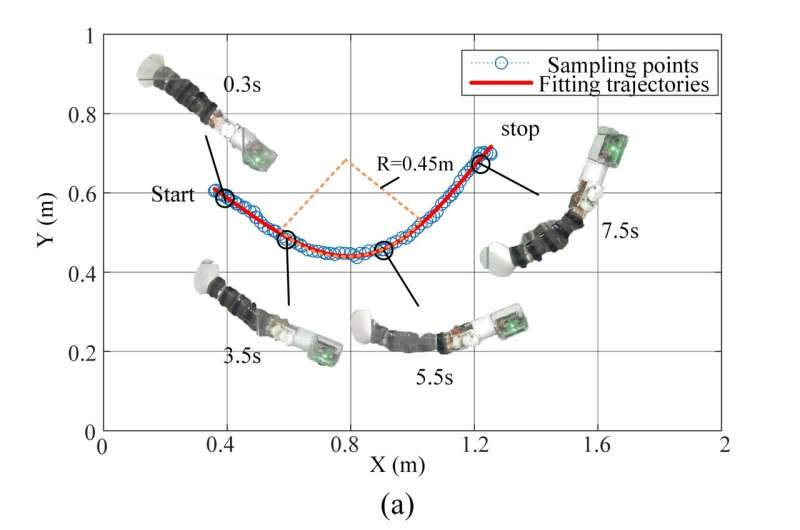
研究人员测试了他们的螳螂虾机器人的原型,发现它可以在水下很好地移动,达到0.28 m / s的最大速度和0.36 m的最小转弯半径。这些结果凸显了该机器人在狭窄和复杂的水下环境中执行探索任务的潜力。
值得注意的是,螳螂虾机器人的速度和运动都可以精确且轻松地控制,从而降低与水下障碍物碰撞的风险。研究人员现在计划进一步开发他们的系统,希望它最终将用于监测和拯救海洋环境。
“未来,我们将专注于如何在狭窄的水下环境中实现仿生螳螂虾机器人的自主运动,以完成这种环境下的探测任务,”陈说。
“我们计划优化机器人的结构、形状和硬件系统设计,以提高其在3D空间中的六自由度运动能力和更高的水下运动速度。然后,增加IMU、摄像头、深度传感器等信息采集设备,通过对环境信息的分析和自身姿态的反馈调整,实现机器人更精准的闭环运动控制。
虽然该团队的机器人已经取得了令人鼓舞的成果,但它仍处于开发的早期阶段。Chen和他的同事们现在将继续改进和测试他们的机器人,以确定其在狭窄的水下环境中航行的能力。
“在接下来的研究中,我们还将使用碳纤维和嵌入式高强度材料来增强机器人每个组件的耐用性和可靠性,”Chen补充道。“这可以为在密闭水下环境中的实际应用奠定基础。