昆虫机器人听起来像是电影中的东西,但混合昆虫计算机机器人,正如科学上所说的那样,可以开创机器人的新未来。它涉及使用电刺激来控制昆虫的运动。现在,一个国际研究小组对棒状昆虫腿部肌肉中的电刺激与由此产生的扭矩(导致腿部移动的扭转力)之间的关系进行了研究。
昆虫机器人可能听起来像科幻小说,但这是一个相对较新的现象,基于使用电刺激来控制昆虫的运动。这些混合昆虫计算机机器人,正如它们所称的那样,预示着小型、高移动性和高效设备的未来。
然而,尽管取得了重大进展,但由于不同昆虫的神经和肌肉系统之间存在巨大差异,进一步的进展变得复杂。
在最近发表在《eLife》杂志上的一项研究中,一个国际研究小组研究了棒状昆虫腿部肌肉中的电刺激与合成扭矩(使腿部移动的扭转力)之间的关系。
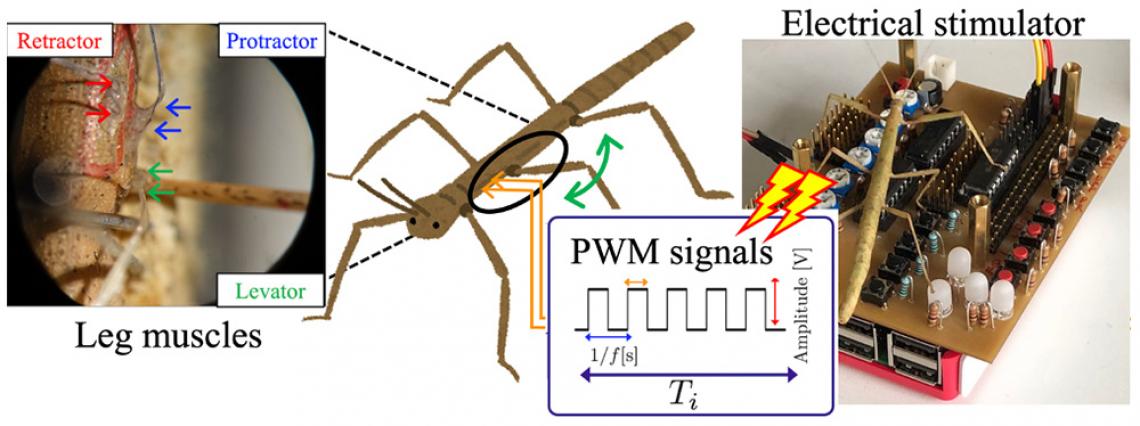
他们专注于在昆虫运动中起重要作用的三块腿部肌肉:一块用于推进,一块用于关节僵硬,一块用于在站立和摆动腿部之间过渡。这些实验涉及研究人员保持棒状昆虫的身体固定,并电刺激三块腿肌肉中的一块,以产生类似行走的运动。
这项研究由东北大学工学研究生院机器人系副教授Dai Owaki领导。实验在德国比勒费尔德大学由Volker Dürr教授和Josef Schmitz教授经营的实验室进行。
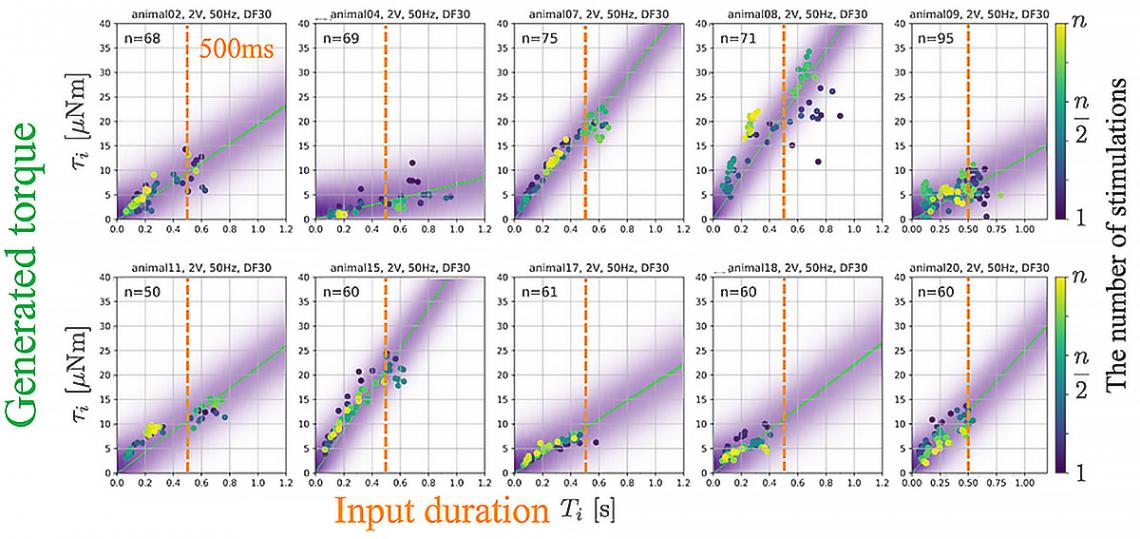
“根据我们的测量结果,我们可以生成一个模型,该模型可以预测对腿部肌肉施加不同模式的电刺激时产生的扭矩,”Owaki指出。“我们还确定了电刺激的持续时间与产生的扭矩之间几乎呈线性关系,这意味着我们可以通过查看施加电脉冲的长度来预测我们将产生多少扭转力。
仅使用少量测量,Owaki和他的合作者就可以将其应用于每只昆虫。由于这些发现,科学家们将能够改进调整后的生物混合机器人的运动控制,使它们的运动更加精确。
虽然该团队知道他们的见解可以带来具有各种应用的适应性强和高度移动性的设备,但他们仍然列举了一些需要解决的关键挑战。“首先,需要在自由行走的昆虫中实施模型测试,并且必须改进电刺激以更接近地模仿自然神经肌肉信号,”Owaki补充道。