特温特大学外科机器人实验室的研究人员有史以来第一次成功地让两个微型机器人一起工作,在3D环境中拾取、移动和组装被动物体。这一成就为有前途的生物医学应用开辟了新的视野。
想象一下,您需要在身体内的某个地方进行手术。然而,需要手术的部分对于外科医生来说很难到达。将来,几个比一粒盐还小的机器人可能会进入你的身体并进行手术。这些微型机器人可以一起工作来执行各种复杂的任务。“这几乎就像魔术一样,”该出版物的通讯作者Franco Piñan Basualdo说。
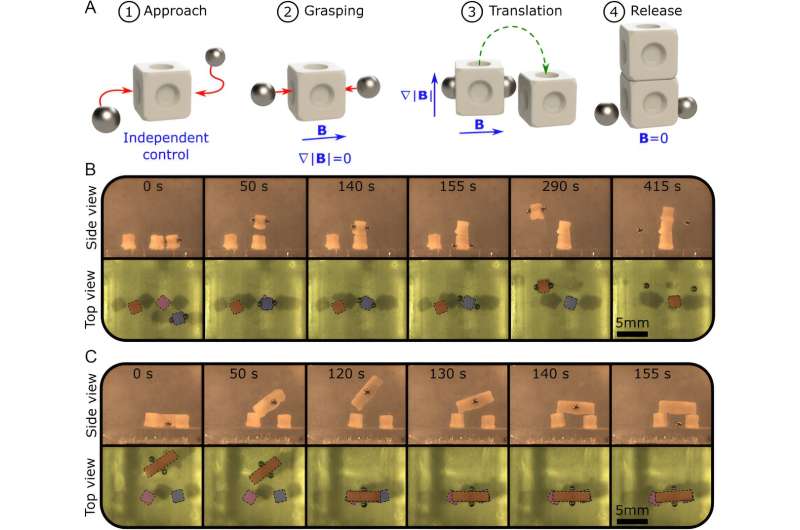
特温特大学的研究人员成功地利用了其中两个1毫米大小的磁性微型机器人来执行多项操作。像发条一样,微型机器人能够拾取、移动和组装立方体。这一成就的独特之处在于机器人执行任务的3D环境。
实现这一目标是一项相当大的挑战。就像普通磁铁在靠得太近时会粘在一起一样,这些微小的磁性机器人的行为类似。这意味着他们在开始粘在一起之前可以接近的程度是有限的。但是外科机器人实验室的研究人员找到了一种方法来利用这种自然吸引力来发挥他们的优势。使用定制的控制器,团队可以移动单个机器人并使它们相互交互。
微型机器人具有生物相容性,可以在难以触及甚至封闭的环境中进行控制。这使得该技术有望用于生物医学研究和应用。“我们可以远程操作生物医学样本而不会污染它们。这可以改善现有程序并为新程序打开大门,“Piñan Basualdo说。
Piñan Basualdo是外科机器人实验室的博士后研究员。他的研究兴趣包括微机器人、非接触控制、群体机器人、活性物质、微流体和界面现象。
这项研究是在外科机器人实验室进行的。实验室负责人Sarthak Misra教授专注于为广泛的临床相关挑战开发创新解决方案,包括生物医学成像,医疗程序自动化以及微型机器人工具的开发。
该研究是在欧洲RĔGO项目(Horizon Europe计划)的框架内进行的,该项目旨在开发一套创新的人工智能驱动,微型,不受束缚,刺激响应的机器人群。研究结果发表在《先进智能系统》杂志上的一篇题为“用于3D微型机器人抓取的协作磁剂”的论文中。