
根据北卡罗来纳州立大学和北卡罗来纳大学教堂山分校的一项新研究,由神经冲动控制的机器人假肢脚踝允许截肢者更“自然”地移动,从而提高他们的稳定性。
“这项工作的重点是姿势控制,这非常复杂”该研究的通讯作者,北卡罗来纳州立大学和北卡罗来纳大学生物医学工程联合系的杰克逊家族杰出教授Helen Huang说。
“基本上,当我们站着不动时,我们的身体会不断进行调整,以保持稳定。例如,如果我们排队时有人撞到我们,我们的腿会做出我们甚至不一定意识到的各种动作,以保持我们的直立。
“我们与下肢截肢的人一起工作,他们告诉我们,使用假肢装置实现这种稳定性是一项重大挑战。这项研究表明,使用肌电图(EMG)信号控制的机器人假肢脚踝非常擅长让用户实现这种自然稳定性。肌电图信号是从个体肌肉记录的电信号。
关于这项研究的论文“神经假体控制恢复站立姿势控制中的近规范神经力学”已发表在《科学机器人》杂志上。该论文由生物医学工程联合系博士生刘文涛共同撰写。
示例参与者响应预期的扰动,其中他们被向后推。当使用他们的日常设备时,个人需要一个步骤来应对干扰,但是使用神经控制的假肢,他们可以保持静态姿势。
这项新研究建立在先前工作的基础上,该工作表明,动力假肢脚踝的神经控制可以恢复一系列能力,包括在具有挑战性的表面上站立和蹲下。
在这项研究中,研究人员与五名单腿膝盖以下截肢的人一起工作。研究参与者配备了一个原型机器人假肢脚踝,可以响应腿部传感器拾取的肌电图信号。
“基本上,传感器被放置在截肢部位的肌肉上,”该研究的合著者,最近从北卡罗来纳州立大学获得博士学位的Aaron Fleming说。“当研究参与者考虑移动截肢时,这会通过下肢的残余肌肉发送电信号。传感器通过皮肤拾取这些信号,并将这些信号转换为假肢装置的命令。
研究人员使用原型设备对研究参与者进行了一般培训,以便他们对该技术有所了解。
然后,研究参与者的任务是应对“预期的扰动”,这意味着他们必须对可能破坏平衡的事情做出反应。在日常生活中,这可能是接球或捡杂货之类的事情。然而,为了在研究过程中精确地复制条件,研究人员开发了一种旨在挑战参与者稳定性的机械系统。
研究参与者被要求在两种情况下对预期的扰动做出反应:使用他们通常使用的假肢装置;并使用机器人假肢原型。
“我们发现研究参与者在使用机器人原型时明显更稳定,”弗莱明说。“他们不太可能绊倒或跌倒。
“具体来说,机器人原型允许研究参与者改变他们的姿势控制策略,”黄说。“对于下肢完整的人,姿势稳定性从脚踝开始。对于失去下肢的人,他们通常必须弥补脚踝的缺乏控制。我们发现,使用响应肌电图信号的机器人脚踝可以让用户恢复到保持稳定性的本能反应。
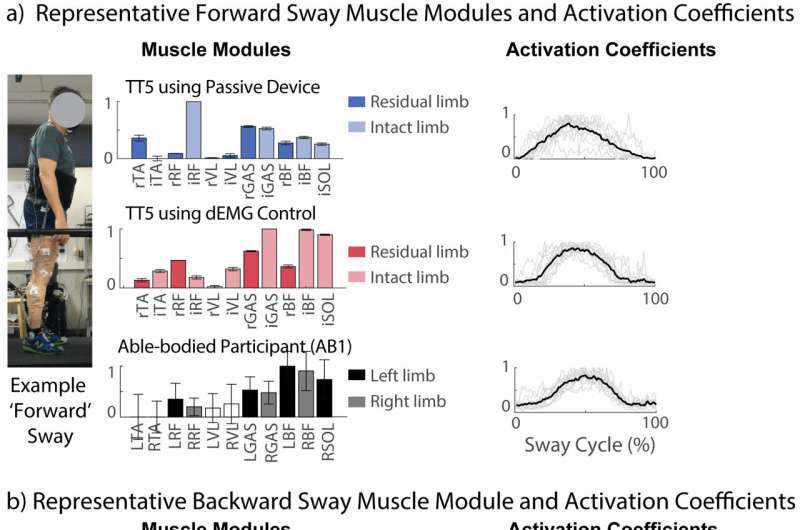
在研究的另一部分,研究人员要求研究参与者在使用普通假肢和使用原型机器人假肢时来回摇摆。研究参与者配备了旨在测量整个下半身肌肉活动的传感器。
“我们发现,当人们使用两种不同的假肢时,下半身的肌肉活动模式非常不同,”黄说。
“基本上,使用原型假肢时的肌肉激活模式与我们在充分利用两个完整下肢的人身上看到的模式非常相似。这告诉我们,我们开发的原型足够接近地模仿身体的行为,以允许人们的“正常”神经模式恢复。这很重要,因为它表明该技术对用户来说会有些直观。
“我们认为这是一个具有临床意义的发现,因为姿势稳定性对于使用假肢装置的人来说是一个重要问题。我们现在正在与更多的人进行一项更大规模的试验,以展示该技术的效果并确定哪些人可能受益最多。