在月球上,有人类有朝一日可以开采和使用原材料。欧洲航天局(ESA)等各种航天机构已经在计划任务,以更好地探索地球卫星并寻找矿物。这需要适当的勘探车辆。由苏黎世联邦理工学院领导的瑞士研究人员现在正在寻求不仅派遣一个单独的漫游车进行探索之旅的想法,而且派遣整个飞行器和飞行设备团队相互补充。
研究人员为三个ANYmal(ETH开发的一种有腿机器人)配备了一系列测量和分析仪器,这些仪器可能使它们成为未来合适的勘探设备。他们在瑞士和卢森堡的欧洲空间资源创新中心(ESRIC)的各种地形上测试了这些机器人,几个月前,瑞士团队与德国同事一起赢得了欧洲月球探测机器人竞赛。比赛涉及在以月球表面为模型的测试地点寻找和识别矿物。在最新一期的《科学机器人》 杂志上,科学家们描述了他们如何使用机器人团队探索未知的地形。
苏黎世联邦理工学院以及巴塞尔大学、伯尔尼大学和苏黎世大学的研究人员通过配备三个有腿机器人作为专家来解决这个问题。 系统的核心包括一个由三个四足机器人组成的团队。ANYmal是所有机器人的基础平台。这三个机器人中的每一个都有一个专门的角色和一组独特的有效载荷,用于探索和科学数据收集。显示了我们的腿部机器人团队:侦察兵,混合动力和科学家。侦察兵的主要任务是使用其额外的光探测和测距(LiDAR)传感器和RGB(红色,绿色,蓝色)相机快速探索环境。它为由机器人操作员和行星科学家组成的运营团队提供了以前未知区域的概述,并允许团队确定潜在的科学目标。它的次要任务是使用增强的定制滤光轮(CTX-FW)的方位-倾斜环境成像仪捕获各种光谱波段中潜在科学目标的图像。Hybrid的主要任务是使用带有附加热像仪(CTX-TH)的方位-俯仰环境成像仪收集众多目标的科学数据。此外,它还配备了安装在底座上的瑞士万通即时拉曼分析仪XTR DS (MIRA),带有变焦镜头,可采集目标的拉曼光谱。科学家对先前确定的目标进行深入的科学分析。它具有定制的 6 自由度 (DoF) 机械臂,前臂上有一个 MIRA,手腕上有一个定制的显微成像仪 (MICRO)。
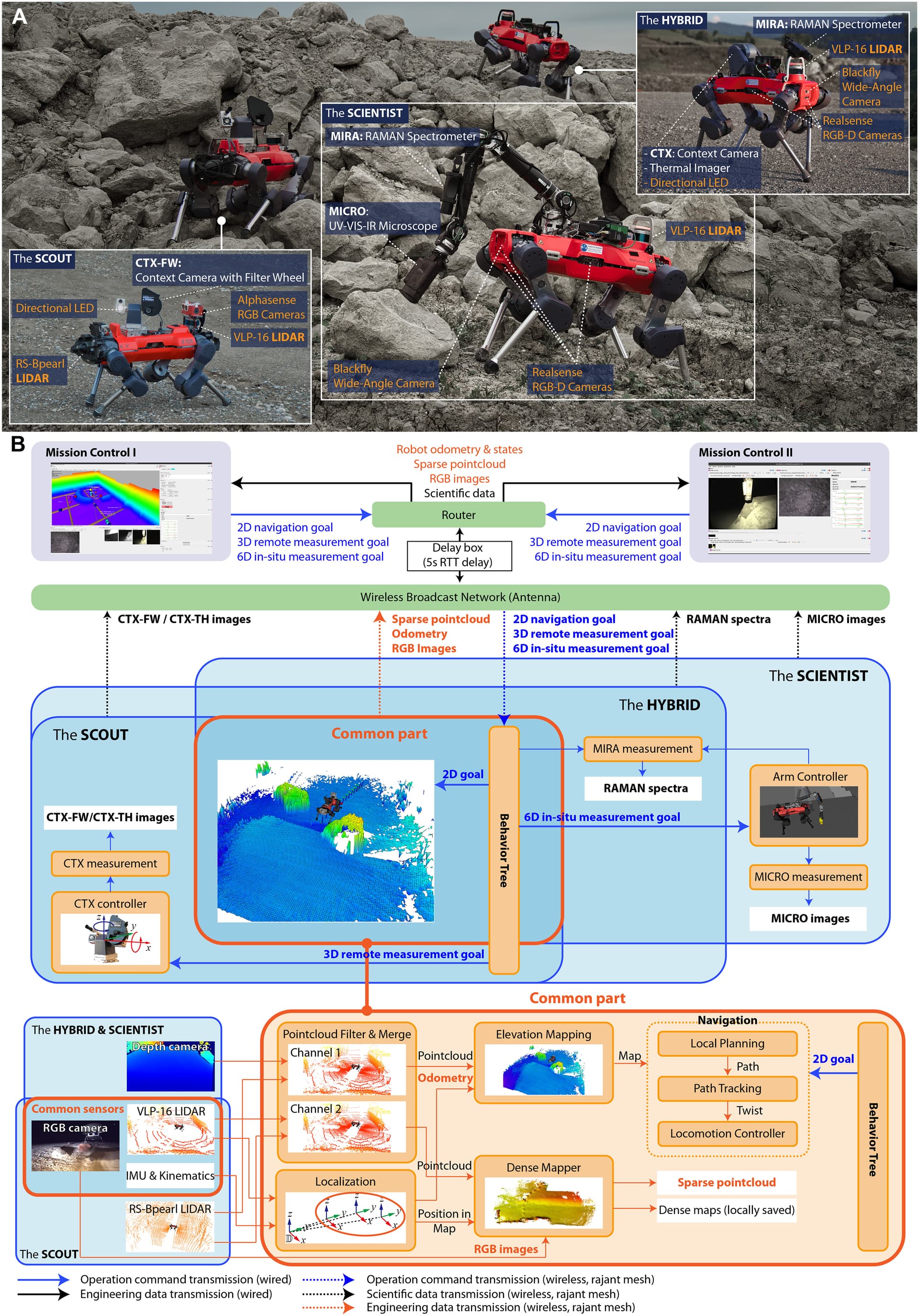
(A )侦察兵,科学家和混合动力车上的机器人和科学有效载荷。机器人有效载荷和科学有效载荷分别以橙色和白色标记。(B ) 我们系统软件架构的高级概述。通过每个机器人共享和专用模块的平衡组合,我们设计了一个安全而高效的多机器人系统。
研究人员还计划使机器人更加自主。目前,来自机器人的所有数据都流入控制中心,操作员将任务分配给各个机器人。未来,半自主机器人可以直接相互分配某些任务,并为操作员提供控制和干预选项。