在系统盘上和自己电脑上配置的,roslaunch launch/mavros_posix_sitl_kerloud_falcon.launch
可以出现仿真环境和飞车,但是 roslaunch off_mission off_mission.launch simulation_flag:=1一直没反映
(卡在图中终端显示的地方,没有继续),是不是要更新offboard_demo才行,我的offboard_demo并没有如Offboard Control in ROS using C++ API — Kerloud Flying Rover documentation 中进行更新;
另外,如何确定自己的电脑中的仿真配置成功了呢,reamd_me中说的The required toolchain should be setup as instructed in:https://cloudkernel.cn/kerloud-autopilot/advanceddev/,这里我自己运行的
bash ubuntu.sh
bash ubuntu_sim_ros_melodic.sh
有报错没有解决,但是不影响roslaunch launch/mavros_posix_sitl_kerloud_falcon.launch,另外我需不需要在px4-firmware下执行make px4_fmu-v3_default,我觉得read_me文档说的不详细,希望能给我一个补充部署的教程文档
1.请更新offboard_demo软件包,近期有更新
2. px4的开发toolchain需要安装好,遇到github问题需要科学上网,或者针对报错处逐一处理,比较麻烦的是mavros的geographic_lib安装部分,请对应搜索csdn的解决方法。
注意toolchain安装需要在ubuntu 18.04和使用我们px4软件的v1.10.0版本
git clone --recursive https://gitee.com/cloudkernel-tech/Firmware.git
git checkout master_kerloud_v1.10.0
- 启动roslaunch时一定需要先source工作区,这样我们定制的mavros包才能生效
- 如果还不行,可以先试下那个DASA优盘,参考用户手册的启动,里面环境是测试过的。

应该问题不大,看了下显示你的mavros 是启动了,但需要用我们那个mavros 包,在教程中有说明,需要把我们那个mavros 在工作区编译,注意分支需要切换到飞车那个
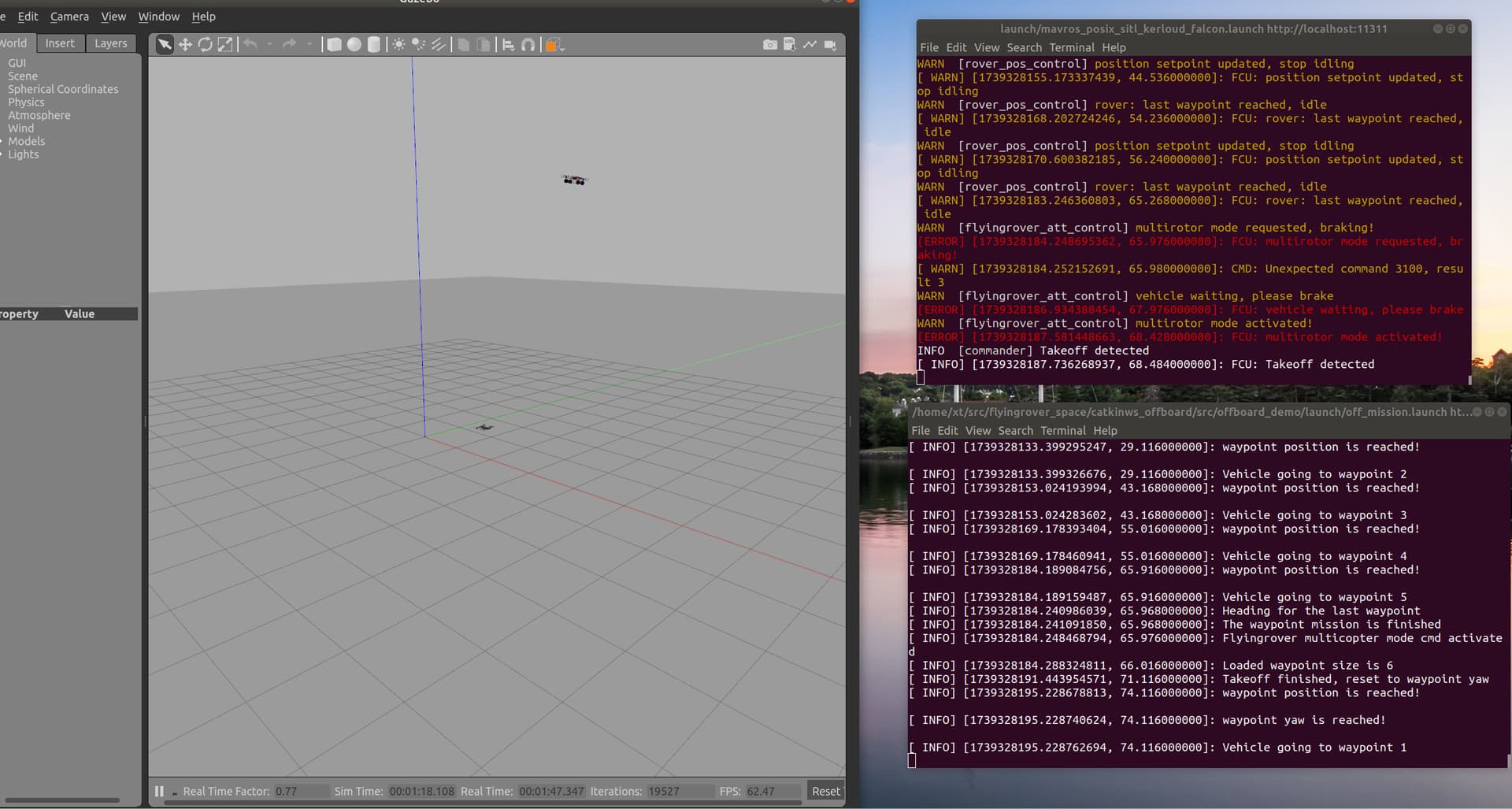
更新demo后,启动成功了,地面几个点然后空中几个点降落,这是不是就是配置成功了,px4 toolchain那边的报错还要管吗?另外在切换到飞行时,终端[ERROR] [1739328184.248695362, 65.976000000]: FCU: multirotor mode requested, braking!
[ WARN] [1739328184.252152691, 65.980000000]: CMD: Unexpected command 3100, result 3
WARN [flyingrover_att_control] vehicle waiting, please brake
[ERROR] [1739328186.934388454, 67.976000000]: FCU: vehicle waiting, please brake
WARN [flyingrover_att_control] multirotor mode activated!
[ERROR] [1739328187.581448663, 68.428000000]: FCU: multirotor mode activated!
是正常的吗
没事,这是因为软件逻辑有个切换状态时需要刹车停止的提醒,仿真的刹车和实际刹车不太一样