操作过程:* EKF2_AID_MASK 设置为24(即勾选vision position fusion and vision yaw fusion)
- EKF2_HGT_MODE 设置为VISION :
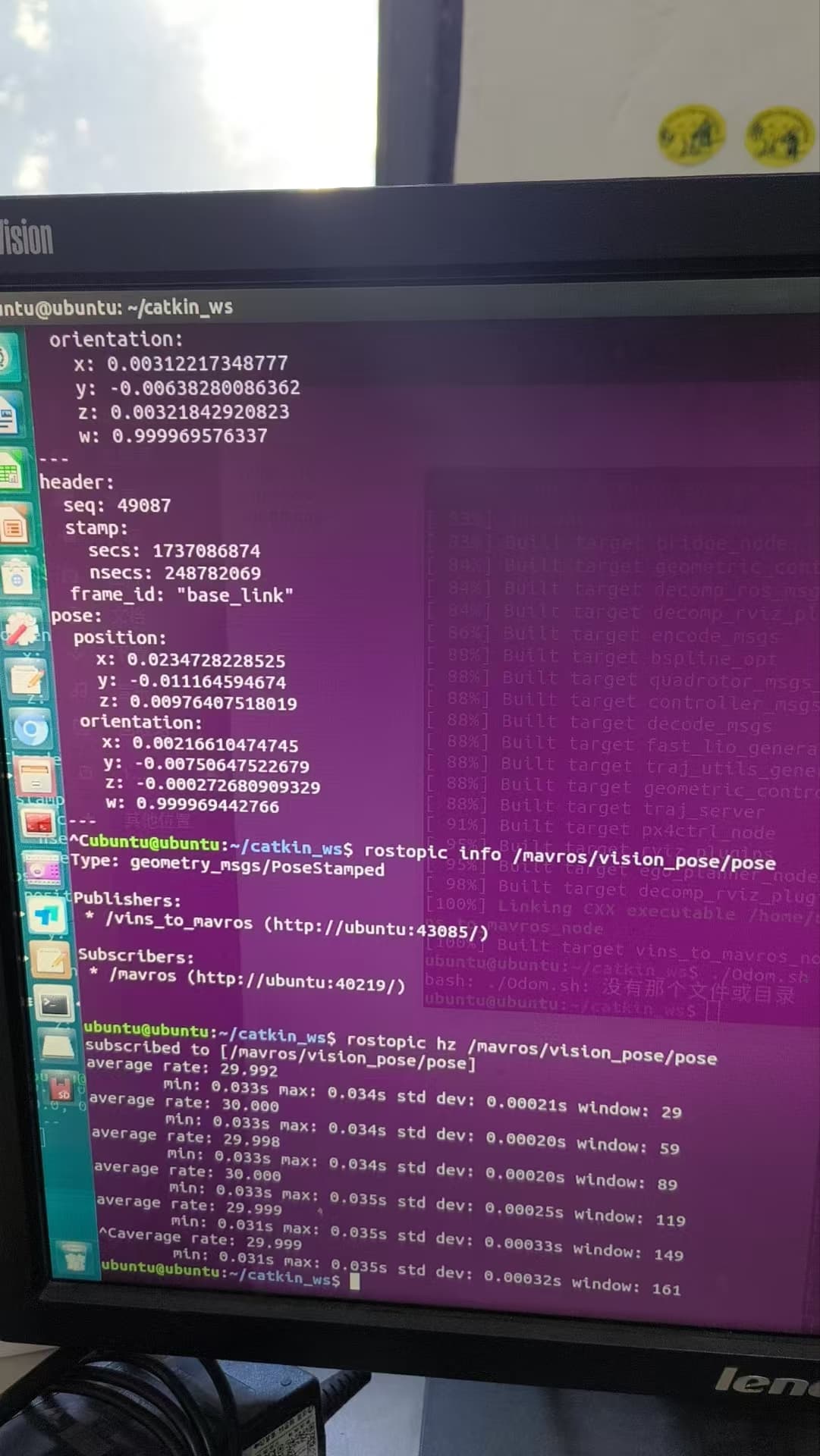
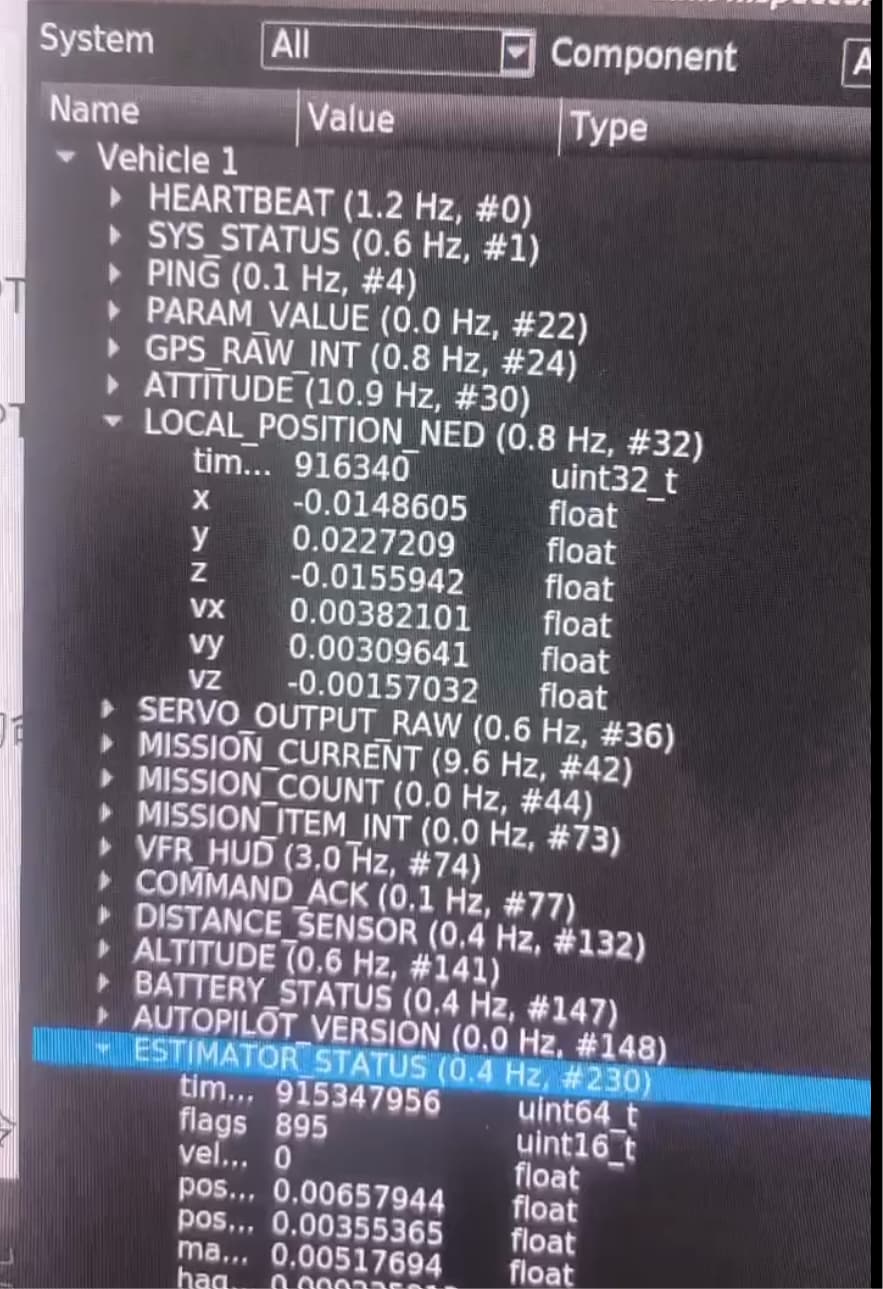
启动激光slam,将雷达里程计话题通过坐标转换节点传递给mavros, 查看相关话题信息和QGc参数
还有其他需要注意的吗,如何确保数据没问题,安全飞行
操作过程:* EKF2_AID_MASK 设置为24(即勾选vision position fusion and vision yaw fusion)
可以手拿着移动,看位置数据是否符合预期