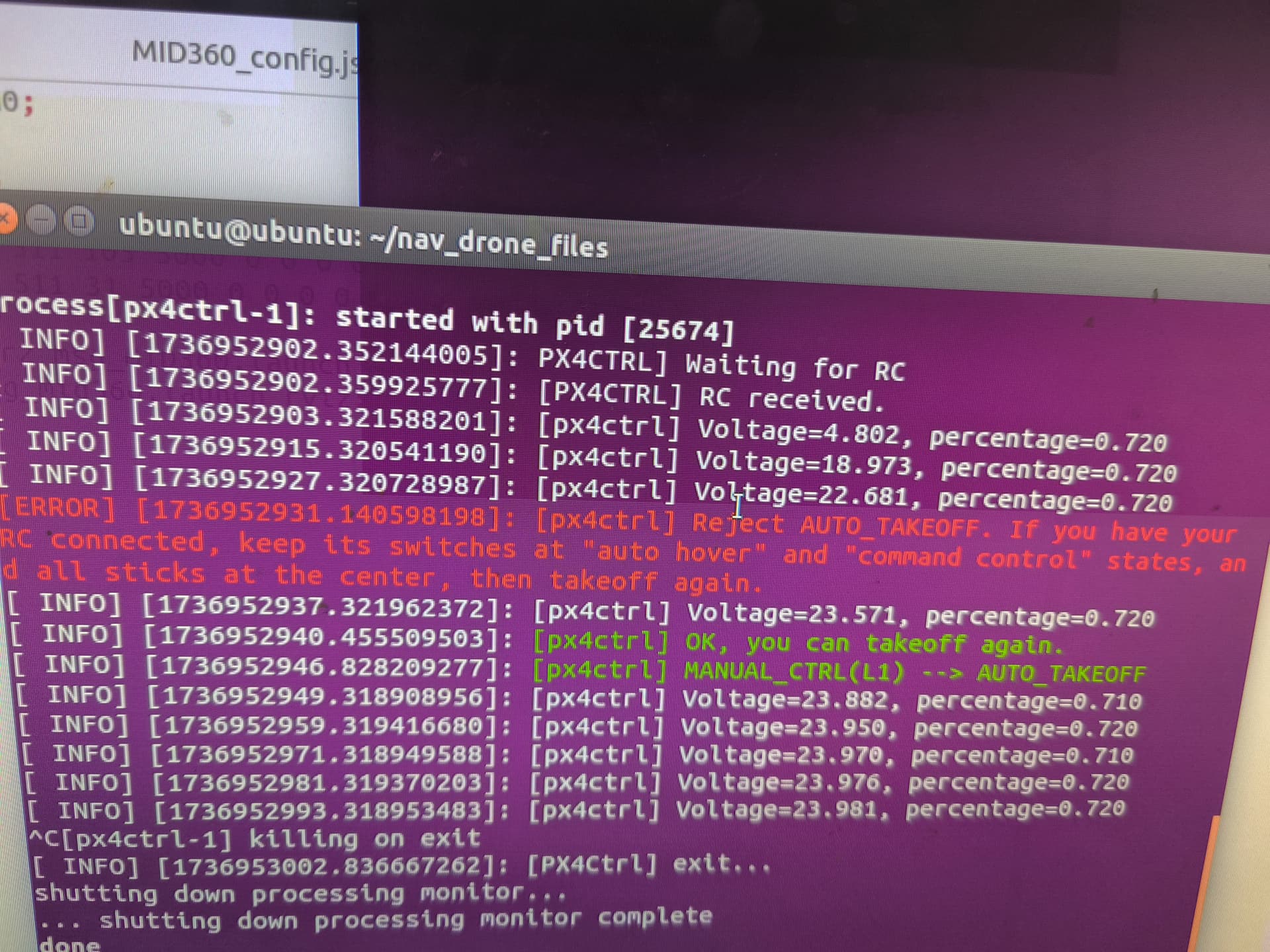
方案采用浙大开源px4ctrl和fastlio2+egoplanner,里程计已经通过imu插值提升200hz,五通道三个stabliz,通道6使能已经启用,1启动mavros,2启动lio2,查看mavros/imu/data和/Odom话题频率分别在170hz与200hz,3.将5.6打到最低,油门归中位;4.启动take_off脚本,终端打印可以进入auto hover; 问题是电机一直是怠速状态(实验时未装桨叶)。找不到问题所在,猜想:1.与电机是不是dshot协议驱动有关吗?2.与飞车底层飞控固件开发过有关吗?改了nuttx的东西编译的固件吗?尚未找到问题所在。
飞车的底层固件有很大变化,不支持px4ctrl等其他开源项目(没有测试过),唯一支持的交互方式是飞车的API
https://cloudkernel.cn/kerloud-flyingrover/API.html
你可以通过借鉴ROS在线控制的教程来实现对飞车的自主控制
https://kerloud-flyingrover.readthedocs.io/en/latest/tutorials/offboard_python.html
https://kerloud-flyingrover.readthedocs.io/en/latest/tutorials/offboard_cplus.html
针对视觉定位相关的设置,目前飞车与px4的EKF参数基本一致,请参考V1.10.0版本的说明:
https://discourse.cloudkernel.cn/t/topic/212
https://github.com/cloudkernel-tech/Firmware/tree/master_kerloud_v1.10.0
开源控制器不支持,感知和规划的开源算法应该不影响使用吧?
不影响使用,只是动作指令的topic需要根据飞车的来调用,大部分是一样的。
你也可以考虑采购我们的仿真器,它的反应和实际飞车一样,可以大大减少软件开发时间
https://cloudkernel.cn/kerloud-flyingrover/tutorials/sitl.html#tutorial-sitl
这个仿真要多少钱
请详询我司客服获取详情,微信号cloudkernel_tech