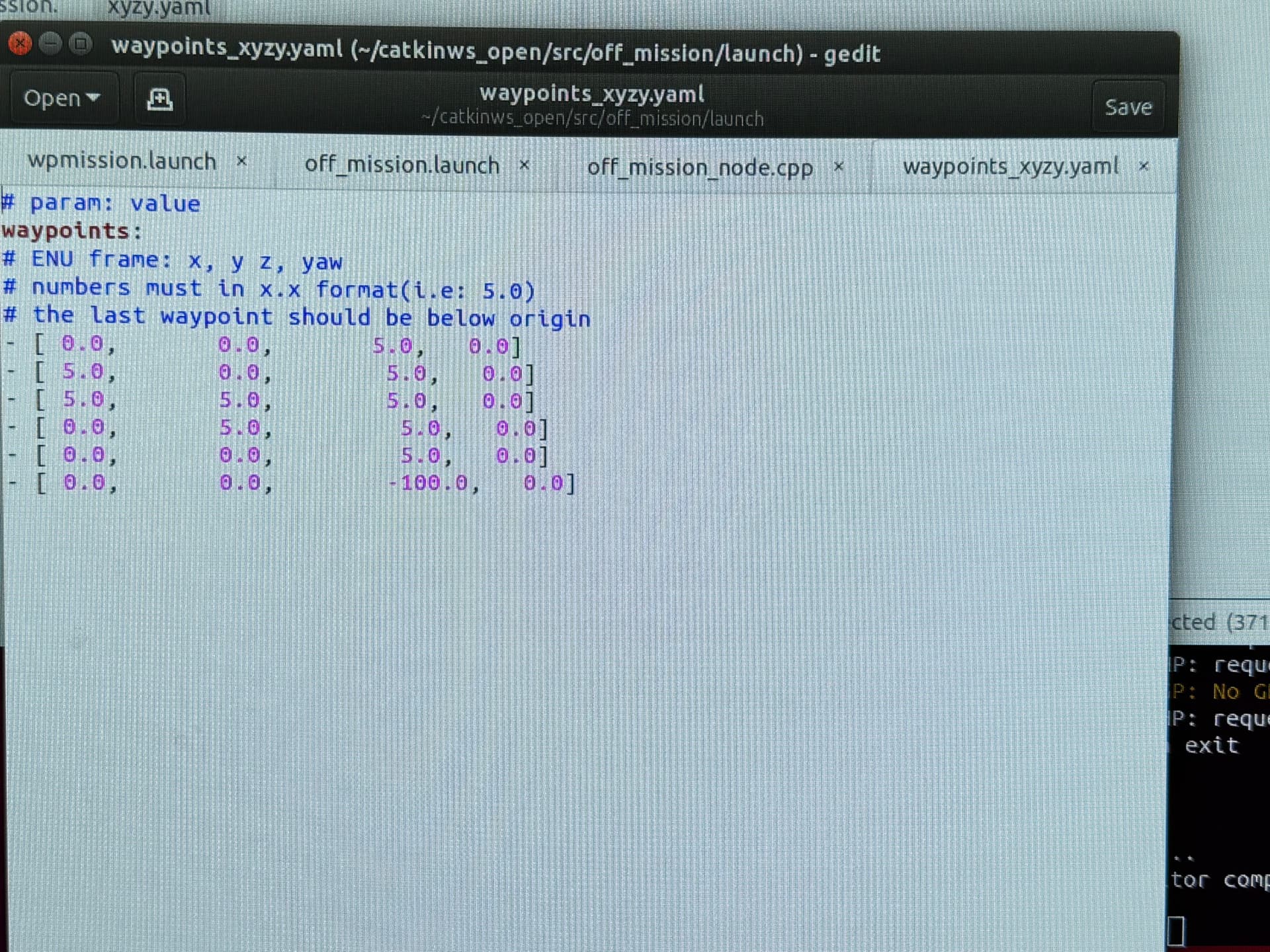
这个数值代表的是ENU坐标系下x,y,z和偏航角的值,最后一个点是降落点,为了方便就给设置成-100,使飞机可以一直向下飞降落和锁定
你好,如果想要修改XY轴的速度需要修改哪里呢?
可以使用我们支持的ros api 进行编程,应用程序接口 (API) — KerloudUAV documentation
对应topic是 ~mavros/setpoint_velocity/cmd_vel_unstamped, ~mavros/setpoint_velocity/cmd_vel
可以在仿真环境进行测试