Kerloud无人机ROS开发系列教程(4): 准备工作 (Part 2)
2.2 Kerloud无人机开发平台

我们推出无人机系列产品的初衷是我们认为无人机技术是一把双刃剑,它已经开启了很多军事和民用领域的应用,包括空中摄影,搜寻和营救,监控,地表建图,军事侦测和袭击。我们相信传播更多的技术细节有助于吸引更多人进入这个领域,从而更好地造福社会。
Kerloud UAV系列作为云讷科技(深圳)面向无人机系统集成爱好者的高性价比开发平台,支持PX4、Dronecode、ROS、Nvidia和Ubuntu等高级软件社区。
Kerloud无人机开发平台的网站是:https://cloudkernel.cn/kerloud-uav/index.html, 它包含双语内容,最大程度地保留了技术语言的准确性。
无人机类型及特点
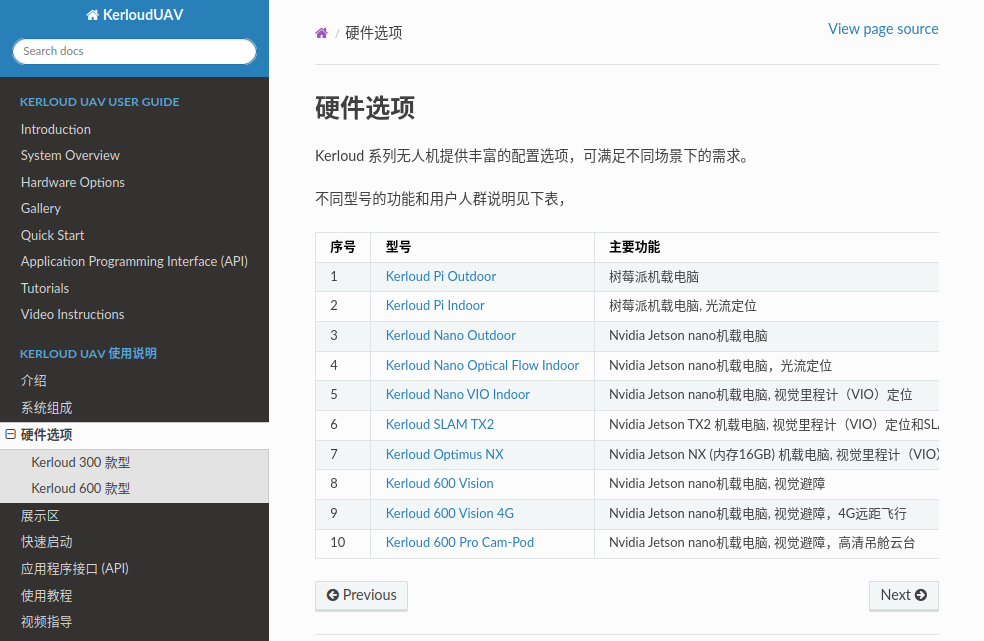
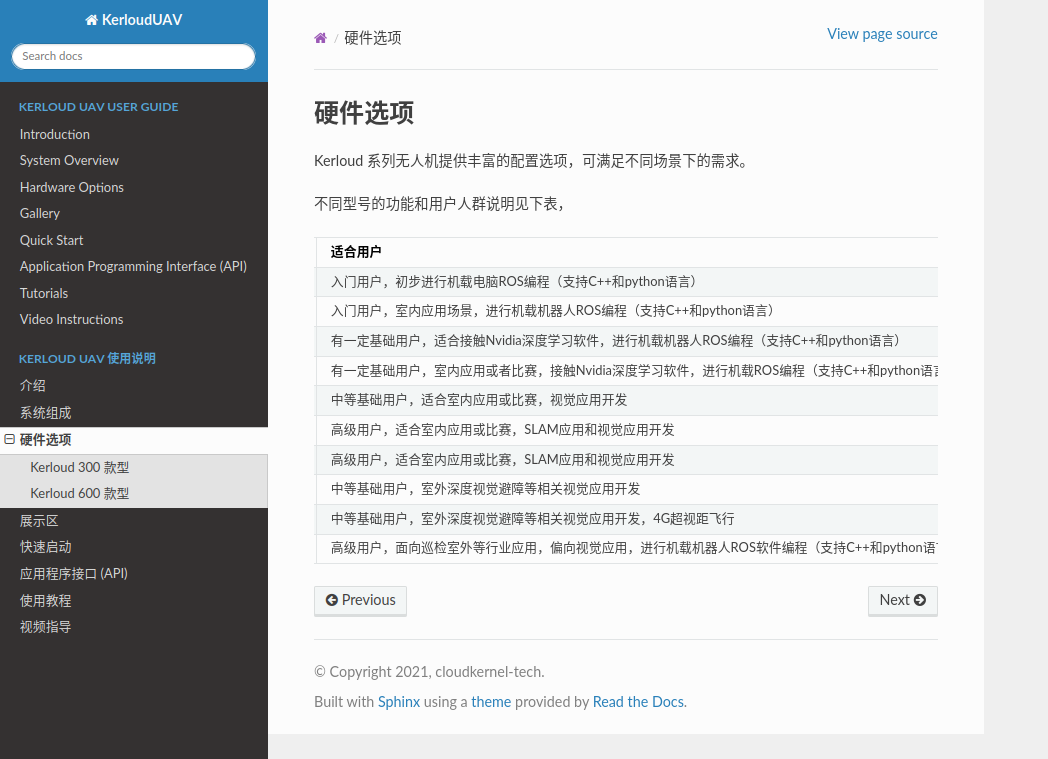
Kerloud无人机款型有很多种,详见:https://cloudkernel.cn/kerloud-uav/hardwareopt/hardwareoptions_zh.html,也支持定制设计。主要区别是机载电脑和算法软件,用户可以根据自身水平进行选择,在链接中的表格右栏说明了用户分类。
硬件兼容性考虑
Kerloud无人机在设计时非常注重硬件兼容性,飞控和机载电脑选择上都考虑到用户生态内容支持。Kerloud飞控是我们自研的pixhawk开源飞控,软件开源,同时会长期支持;机载电脑选择有树莓派和Nvidia Jetson系列,软件生态丰富,支持复杂的应用开发。
读者可以在我们官方的店铺进行购买,如果预算不够也可以和我们联系购买Kerloud飞控和其他淘宝机架适配使用,这样也可以得到我们的服务支持,教程中的基本内容也可学习。
官方店铺:首页-云讷科技-淘宝网
回到教程目录:Kerloud无人机ROS开发系列教程(1):目录