Nvidia机器人仿真技术突破机械手瓶颈
什么是机器人仿真
开发人员在虚拟空间创建了机器人、环境以及机器人可能遇到的其他资产的数字版本。这些东西可以遵守物理定律,并模仿现实世界的重力、摩擦、材料和照明条件。机器人模拟器将虚拟机器人放置在虚拟环境中,以测试机器人的软件,而无需现实世界的物理机器人。模拟器可以生成数据集,用于训练将在现实里的物理机器人上运行的机器学习模型。
Nvidia社区对机器人有很好的生态软件支持,提供了大量对标行业的技术工具,这里介绍两个。更多信息可参考:https://developer.nvidia.com/industries/manufacturing/developer-resources-robotics-and-edge-ai-applications
NVIDIA Isaac Gym(https://developer.nvidia.com/isaac-gym)
是nvidia用于强化学习研究的物理模拟环境,通过GPU加速的tensor API可以评估环境和施加动作,支持常见机器人的位置、速度、力和力矩的传感。目前已经实现支持的机器人有无人机、机械手、机械臂、人形机器人和四足机器人等。
(a) 机械臂仿真环境
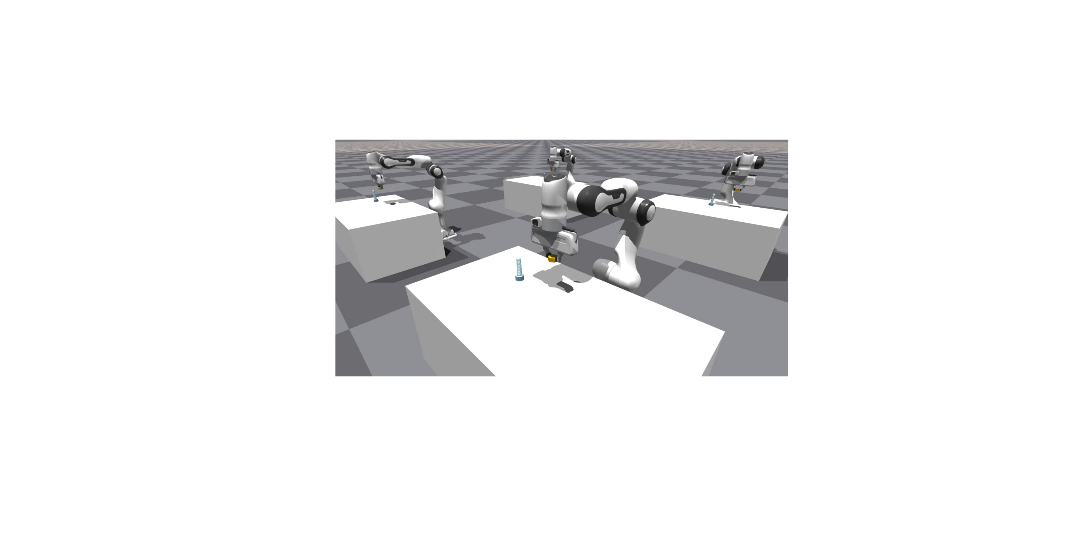
(b) 四足机器狗仿真环境
图1. NVIDIA Isaac Gym的仿真环境

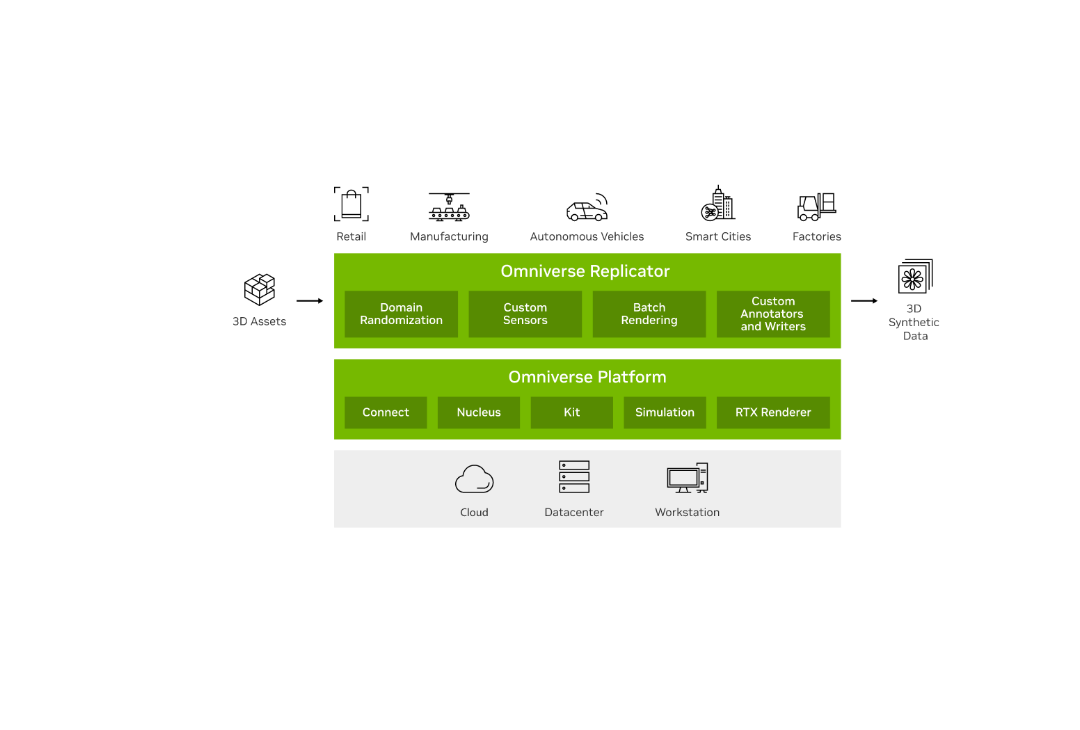
Omniverse Replicator (https://developer.nvidia.com/omniverse/replicator) 是 Omniverse 平台的核心扩展,使研究人员和企业开发人员能够生成物理上准确的合成数据,并轻松构建自定义合成数据生成 (SDG) 工具,以加速计算机视觉 AI 模型和网络的训练。
图2. Omniverse Replicator 的框架示意图
机器人仿真如何让机械手正在掌握灵活性
到目前为止,创建具有人类灵巧性的高性能手已被证明过于复杂。使用深度强化学习可能需要数十亿个标记图像,因此不切实际。NVIDIA的研究人员正在开展一个名为DeXtreme的项目,利用NVIDIA Isaac Gym和Omniverse Replicator来证明它可以用来训练机器人手快速操纵立方体到所需的位置。应用物理定律的DeXtreme项目能够在其模拟宇宙中训练机器人,比在现实世界中训练的速度快10,000倍。这相当于训练天数与数年的差别。这一模拟器壮举表明它具有对接触进行建模的能力,这允许从模拟到真实的转移,这是机器人中手部灵活性的里程碑。项目官方网址是:https://dextreme.org/
图3. DeXtreme机械手项目

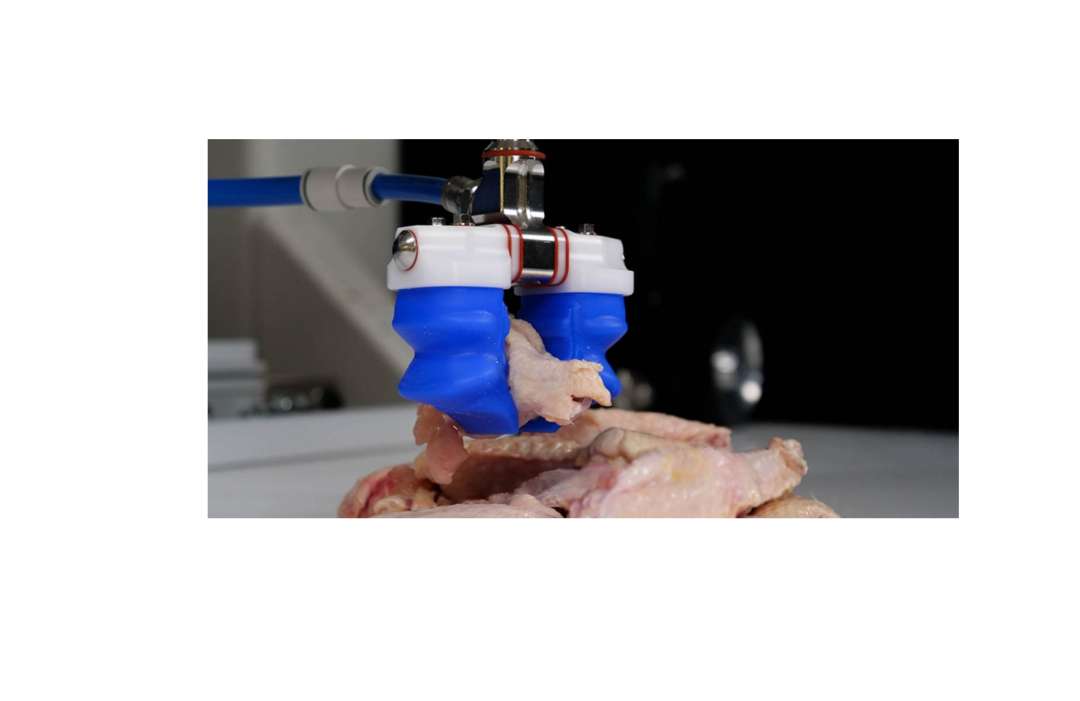
另外一个例子是一家叫Soft Robotics的初创公司,使用 NVIDIA Isaac Sim 平台训练它的食物抓取算法,通过3D视觉和AI技术在食品生产线上实现了自动化。消息链接为:https://blogs.nvidia.com/blog/2023/01/19/isaac-soft-robotics-simulation/
图4. Soft Robotics的食物抓取
编辑:小东
审核: Jay