在本系列教程的第四讲中,我们将深入学习如何使用QGroundControl(QGC)地面站来操作Kerloud Astro无人车。QGC是一个强大的地面控制软件,它支持我们与Kerloud mini控制器进行高效的交互和管理。
QGC地面站简介
QGroundControl是一个广泛使用的开源地面控制软件,它支持与多种无人机和无人车的通信。作为与Kerloud mini控制器交互的平台,QGC提供了以下功能:
- 任务规划与执行
- 实时遥测数据监控
- 飞行数据分析与日志记录
- 传感器集成与数据处理
安装QGroundControl
- 访问QGroundControl的官方网站。
- 根据您的操作系统下载相应的安装包。
- 安装QGroundControl到您的计算机。
连接Kerloud Astro无人车
- 打开QGroundControl。
- 确保Kerloud Astro无人车的Kerloud mini控制器和无线数传模块已经启动。
- 将另一个无线数传模块接入计算机,等到地面站自动连接。
使用QGC地面站操作无人车
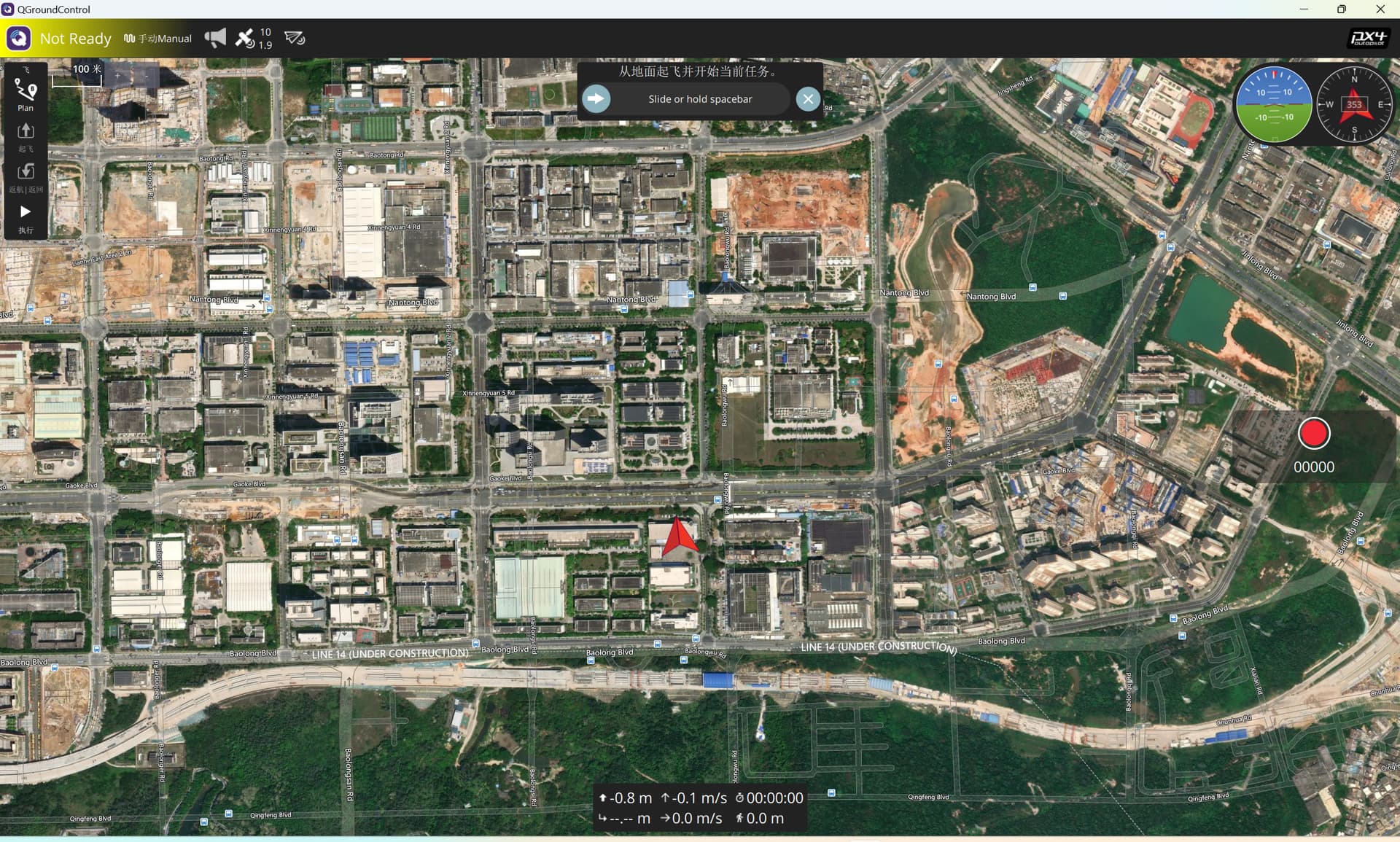
任务规划主页面介绍
任务规划主页面是QGC的核心界面,提供了以下关键功能:
- 无人车信息:显示无人车的实时状态,包括位置、姿态、速度、GPS信号等。
- 控制模式切换:允许用户在手动控制、任务模式、返航等多种控制模式之间切换。
- 解锁/上锁:在安全检查后解锁无人车,准备执行任务;任务完成后上锁,确保安全。
- 航点任务:通过地图界面设置航点,规划无人车的行驶路线和任务行为。
车辆设置
在车辆设置页面,用户可以执行以下操作:
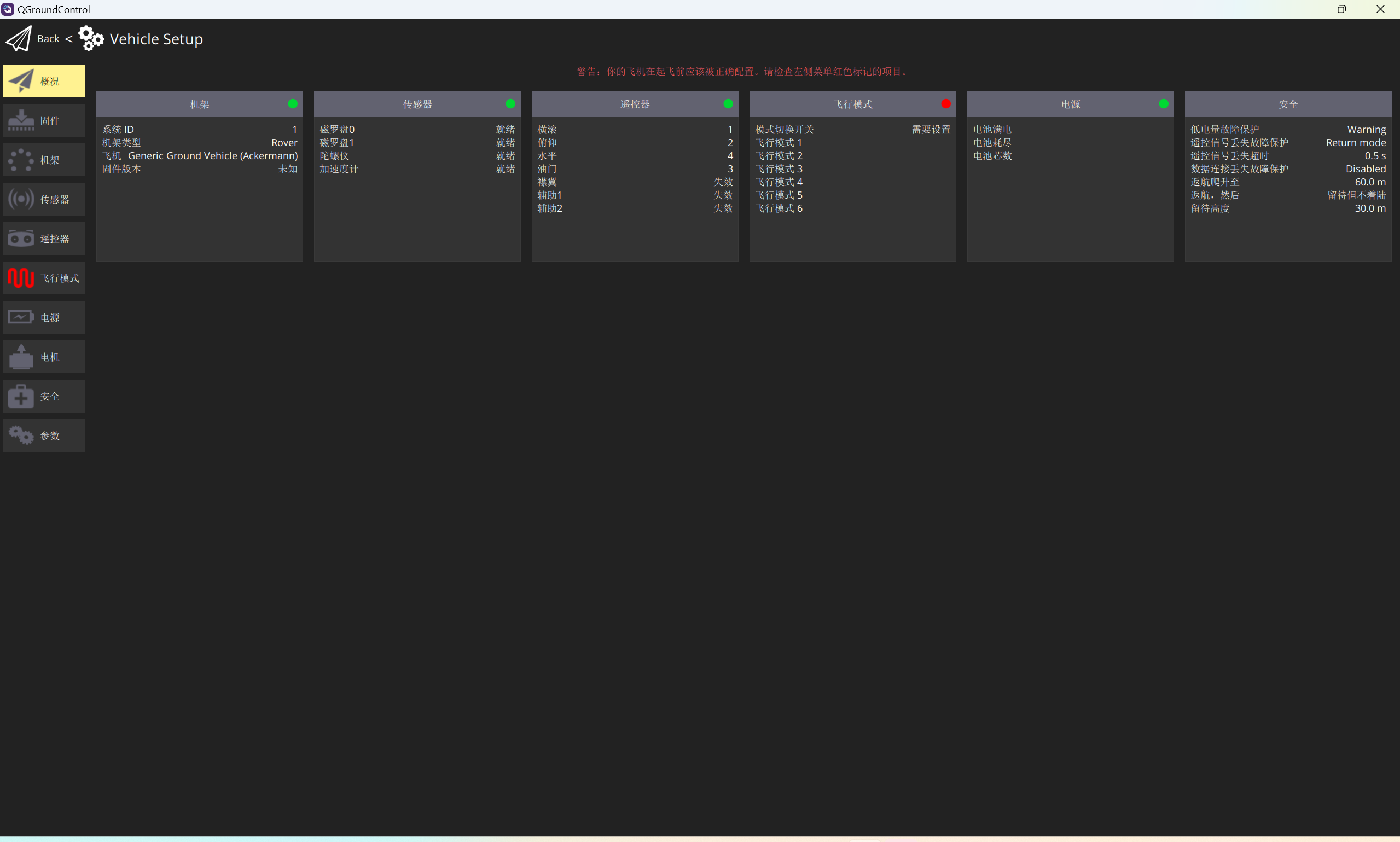
- 查看车辆信息:获取无人车的详细配置和状态信息。
- 传感器校准:根据需要对加速度计、磁力计、遥控器等模块进行校准,以提高定位和导航的准确性。
- 参数设置:这是开发和调参的重要环节,您可以调整Kerloud mini控制器的参数,优化无人车的性能。这些参数可能包括:
- 控制算法参数:根据需要调整PID控制器的参数,优化无人车的稳定性和响应性。
- 转向灵敏度:调整无人车对转向命令的响应速度和灵敏度。
- 电池管理参数:设置电池电量的警告阈值,确保在安全范围内操作。
- 最大速度和加速度:设置无人车的最高速度和加速度,以适应不同的行驶条件和任务需求。
- 通信参数:配置MAVLink等通信协议的参数,确保数据传输的稳定性和可靠性。
- 安全特性设置:启用或配置避障、自动返航等安全功能。

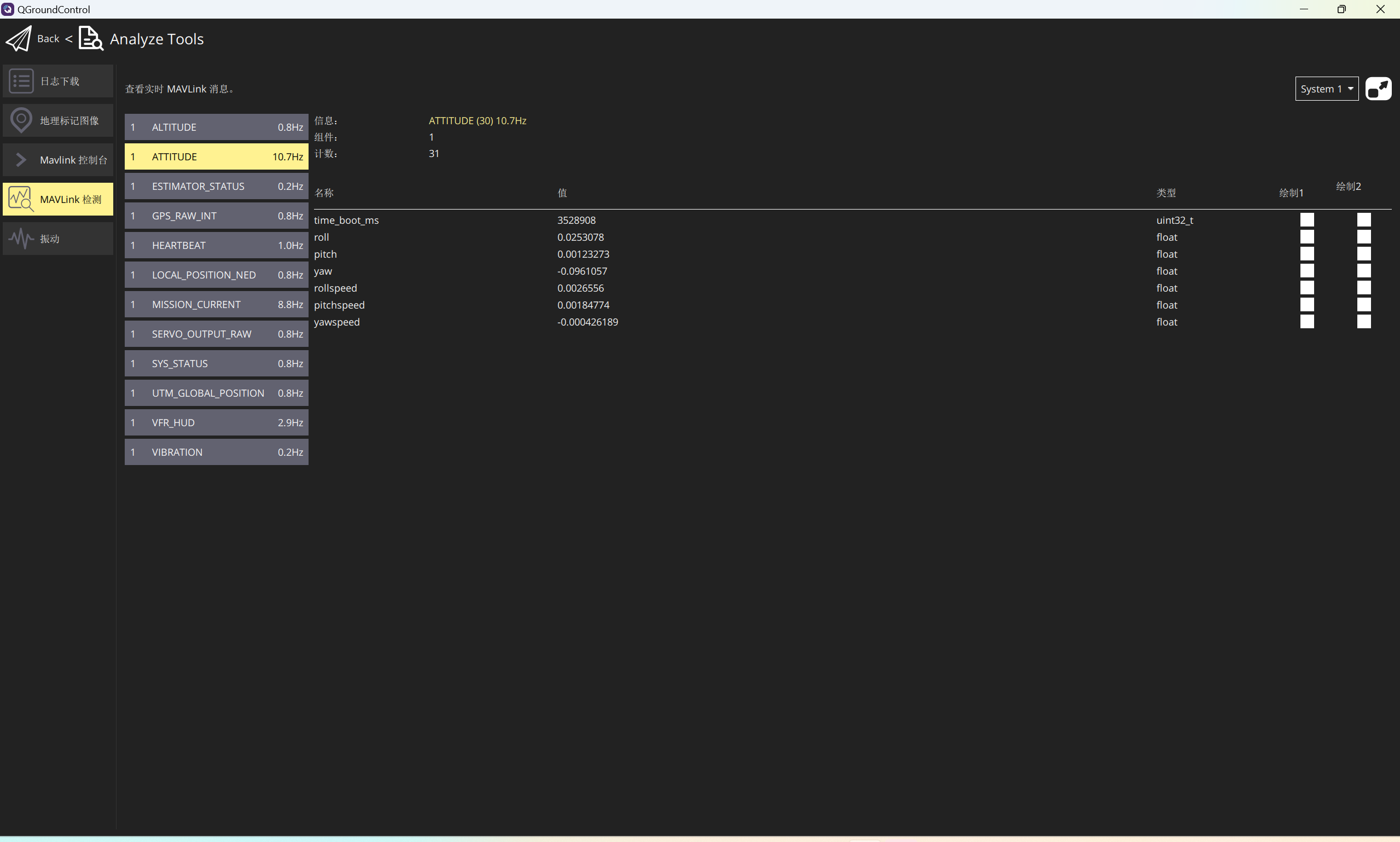
数据分析
数据分析页面提供了以下工具:
- 日志下载:下载无人车的行驶日志,用于后续的数据分析和性能评估。
- MAVLink控制台:提供了一个控制台,用于实时监控MAVLink消息,帮助诊断通信问题。
- MAVLink检测:QGC可以显示MAVLink协议传输的实时数据,包括但不限于无人车的位置、速度、姿态、传感器读数等。
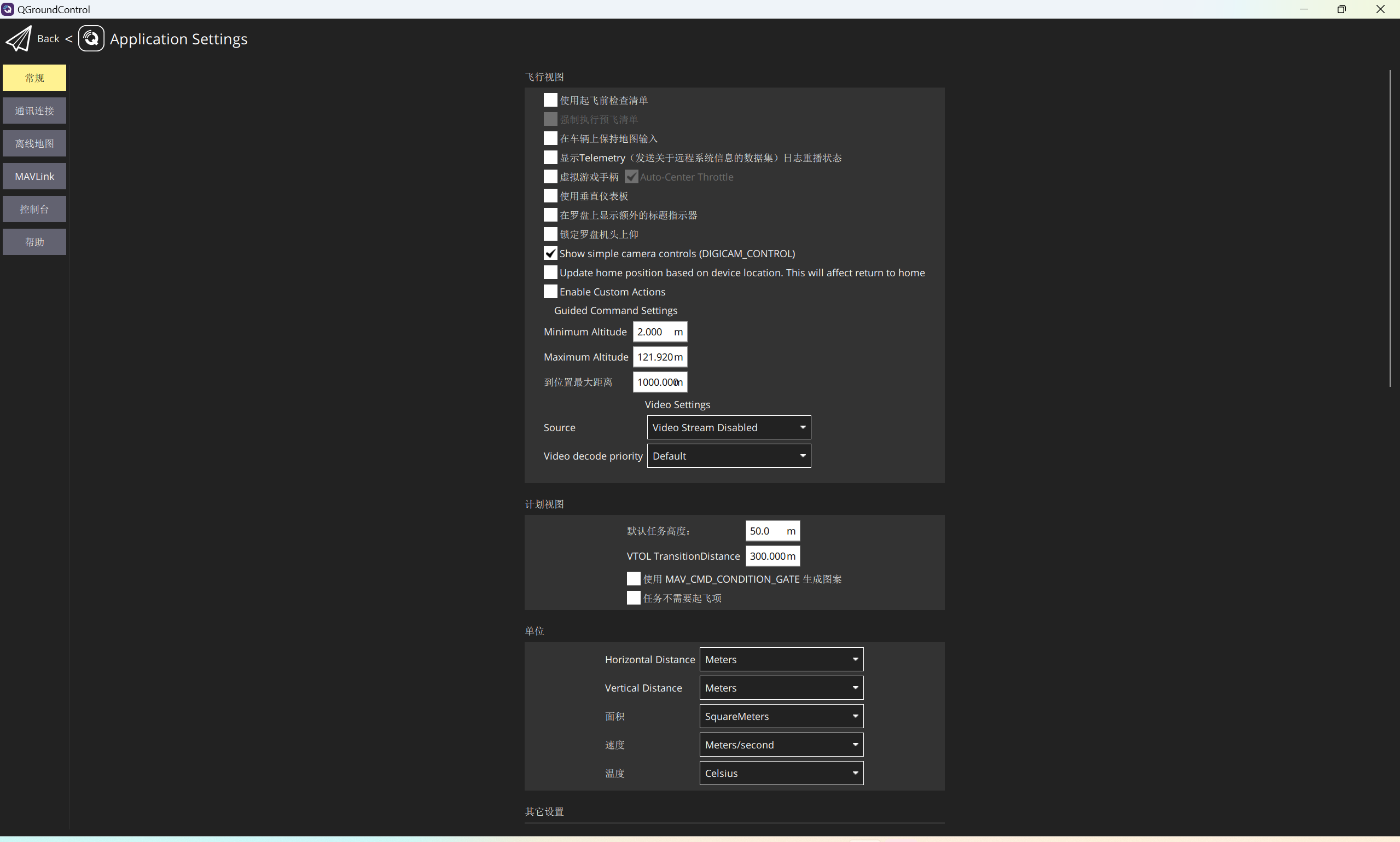
地面站设置
在地面站设置页面,用户可以:
- 设置地面站界面:根据个人喜好和操作习惯调整界面布局和显示选项。
- 通讯连接设置:配置与无人车通信的连接参数,如端口、通信协议等。
结语
通过本教程,您已经学会了如何使用QGroundControl地面站软件来操作Kerloud Astro无人车,并与Kerloud mini控制器进行有效交互。QGC是一个强大的工具,将帮助您更高效地进行无人车的开发、测试和管理。