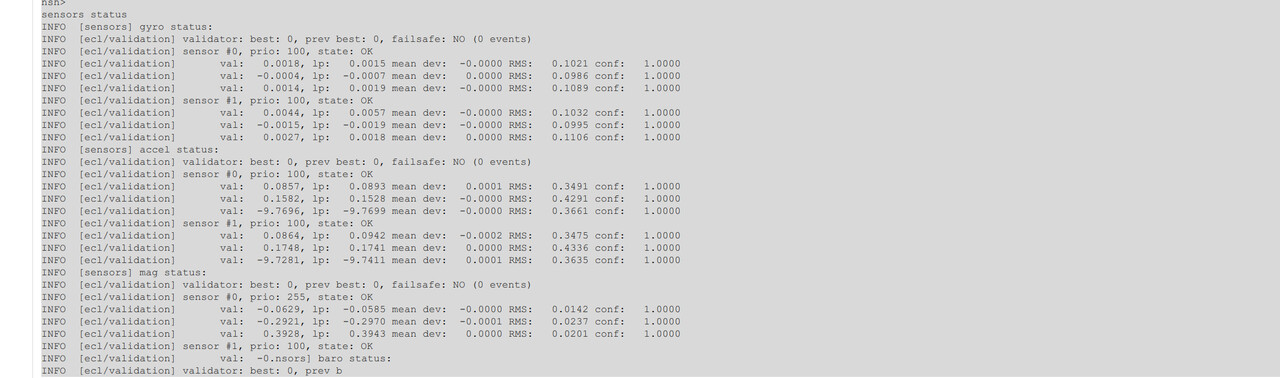
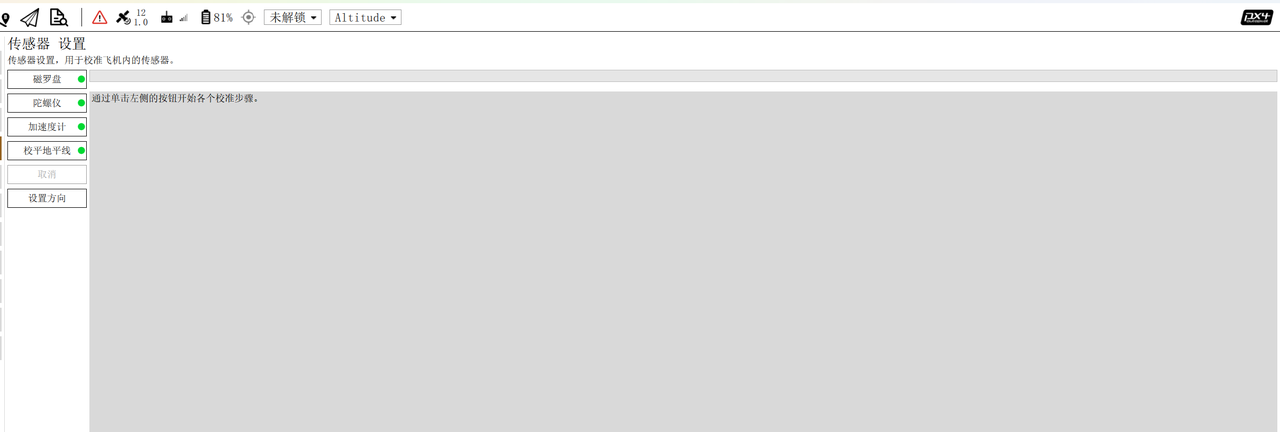
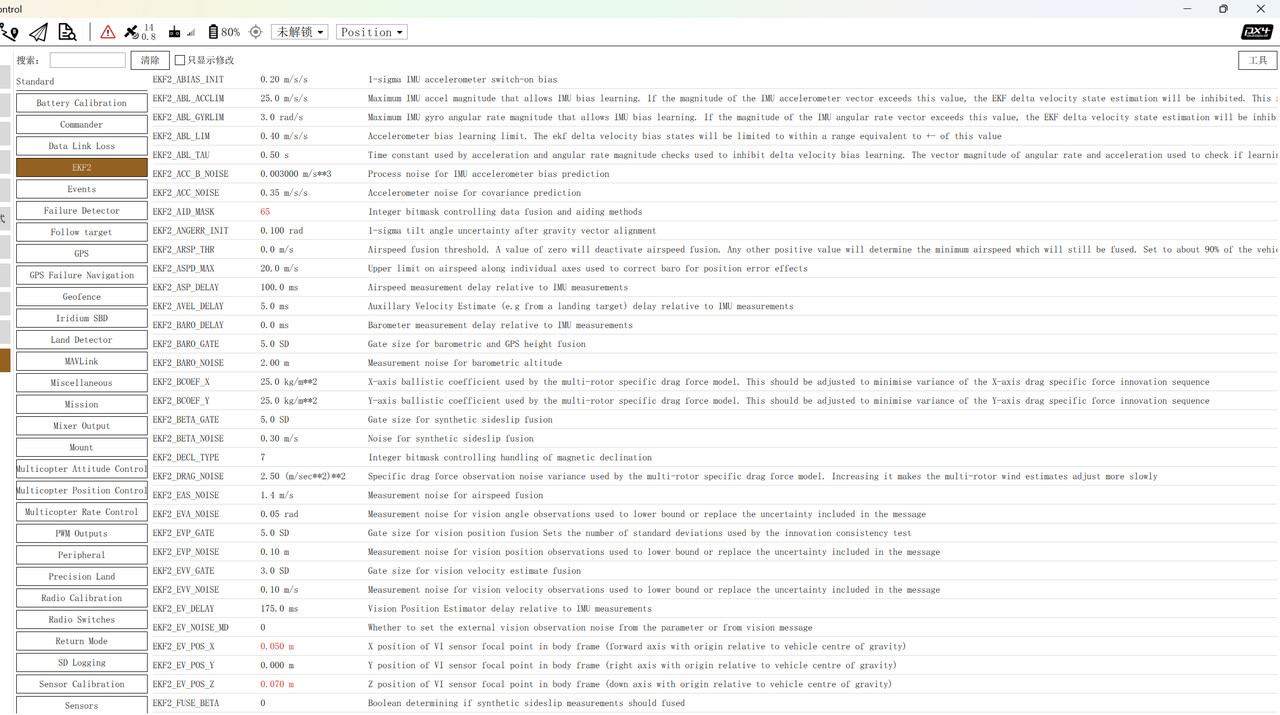
任务执行的各终端日志如下:
roslaunch
(base) ubuntu@ubuntu:~$ roslaunch mavros px4.launch fcu_url:="/dev/ttyPixhawk:921600"
... logging to /home/ubuntu/.ros/log/d64b58fc-11cc-11ef-b7de-60fb008ea472/roslaunch-ubuntu-11166.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ubuntu:34405/
SUMMARY
========
CLEAR PARAMETERS
* /mavros/
PARAMETERS
* /mavros/camera/frame_id: base_link
* /mavros/cmd/use_comp_id_system_control: False
* /mavros/conn/heartbeat_rate: 1.0
* /mavros/conn/system_time_rate: 1.0
* /mavros/conn/timeout: 10.0
* /mavros/conn/timesync_rate: 10.0
* /mavros/distance_sensor/hrlv_ez4_pub/field_of_view: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/frame_id: hrlv_ez4_sonar
* /mavros/distance_sensor/hrlv_ez4_pub/id: 0
* /mavros/distance_sensor/hrlv_ez4_pub/orientation: PITCH_270
* /mavros/distance_sensor/hrlv_ez4_pub/send_tf: True
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/x: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/y: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/z: -0.1
* /mavros/distance_sensor/laser_1_sub/id: 3
* /mavros/distance_sensor/laser_1_sub/orientation: PITCH_270
* /mavros/distance_sensor/laser_1_sub/subscriber: True
* /mavros/distance_sensor/lidarlite_pub/field_of_view: 0.0
* /mavros/distance_sensor/lidarlite_pub/frame_id: lidarlite_laser
* /mavros/distance_sensor/lidarlite_pub/id: 1
* /mavros/distance_sensor/lidarlite_pub/orientation: PITCH_270
* /mavros/distance_sensor/lidarlite_pub/send_tf: True
* /mavros/distance_sensor/lidarlite_pub/sensor_position/x: 0.0
* /mavros/distance_sensor/lidarlite_pub/sensor_position/y: 0.0
* /mavros/distance_sensor/lidarlite_pub/sensor_position/z: -0.1
* /mavros/distance_sensor/sonar_1_sub/horizontal_fov_ratio: 1.0
* /mavros/distance_sensor/sonar_1_sub/id: 2
* /mavros/distance_sensor/sonar_1_sub/orientation: PITCH_270
* /mavros/distance_sensor/sonar_1_sub/subscriber: True
* /mavros/distance_sensor/sonar_1_sub/vertical_fov_ratio: 1.0
* /mavros/fake_gps/eph: 2.0
* /mavros/fake_gps/epv: 2.0
* /mavros/fake_gps/fix_type: 3
* /mavros/fake_gps/geo_origin/alt: 408.0
* /mavros/fake_gps/geo_origin/lat: 47.3667
* /mavros/fake_gps/geo_origin/lon: 8.55
* /mavros/fake_gps/gps_rate: 5.0
* /mavros/fake_gps/mocap_transform: True
* /mavros/fake_gps/satellites_visible: 5
* /mavros/fake_gps/tf/child_frame_id: fix
* /mavros/fake_gps/tf/frame_id: map
* /mavros/fake_gps/tf/listen: False
* /mavros/fake_gps/tf/rate_limit: 10.0
* /mavros/fake_gps/tf/send: False
* /mavros/fake_gps/use_mocap: True
* /mavros/fake_gps/use_vision: False
* /mavros/fcu_protocol: v2.0
* /mavros/fcu_url: /dev/ttyPixhawk:9...
* /mavros/gcs_url:
* /mavros/global_position/child_frame_id: base_link
* /mavros/global_position/frame_id: map
* /mavros/global_position/gps_uere: 1.0
* /mavros/global_position/rot_covariance: 99999.0
* /mavros/global_position/tf/child_frame_id: base_link
* /mavros/global_position/tf/frame_id: map
* /mavros/global_position/tf/global_frame_id: earth
* /mavros/global_position/tf/send: False
* /mavros/global_position/use_relative_alt: True
* /mavros/image/frame_id: px4flow
* /mavros/imu/angular_velocity_stdev: 0.0003490659 // 0...
* /mavros/imu/frame_id: base_link
* /mavros/imu/linear_acceleration_stdev: 0.0003
* /mavros/imu/magnetic_stdev: 0.0
* /mavros/imu/orientation_stdev: 1.0
* /mavros/landing_target/camera/fov_x: 2.0071286398
* /mavros/landing_target/camera/fov_y: 2.0071286398
* /mavros/landing_target/image/height: 480
* /mavros/landing_target/image/width: 640
* /mavros/landing_target/land_target_type: VISION_FIDUCIAL
* /mavros/landing_target/listen_lt: False
* /mavros/landing_target/mav_frame: LOCAL_NED
* /mavros/landing_target/target_size/x: 0.3
* /mavros/landing_target/target_size/y: 0.3
* /mavros/landing_target/tf/child_frame_id: camera_center
* /mavros/landing_target/tf/frame_id: landing_target
* /mavros/landing_target/tf/listen: False
* /mavros/landing_target/tf/rate_limit: 10.0
* /mavros/landing_target/tf/send: True
* /mavros/local_position/frame_id: map
* /mavros/local_position/tf/child_frame_id: base_link
* /mavros/local_position/tf/frame_id: map
* /mavros/local_position/tf/send: False
* /mavros/local_position/tf/send_fcu: False
* /mavros/mission/pull_after_gcs: True
* /mavros/mission/use_mission_item_int: True
* /mavros/mocap/use_pose: True
* /mavros/mocap/use_tf: False
* /mavros/mount/debounce_s: 4.0
* /mavros/mount/err_threshold_deg: 10.0
* /mavros/mount/negate_measured_pitch: False
* /mavros/mount/negate_measured_roll: False
* /mavros/mount/negate_measured_yaw: False
* /mavros/odometry/fcu/odom_child_id_des: base_link
* /mavros/odometry/fcu/odom_parent_id_des: map
* /mavros/plugin_blacklist: ['safety_area', '...
* /mavros/plugin_whitelist: []
* /mavros/px4flow/frame_id: px4flow
* /mavros/px4flow/ranger_fov: 0.118682
* /mavros/px4flow/ranger_max_range: 5.0
* /mavros/px4flow/ranger_min_range: 0.3
* /mavros/safety_area/p1/x: 1.0
* /mavros/safety_area/p1/y: 1.0
* /mavros/safety_area/p1/z: 1.0
* /mavros/safety_area/p2/x: -1.0
* /mavros/safety_area/p2/y: -1.0
* /mavros/safety_area/p2/z: -1.0
* /mavros/setpoint_accel/send_force: False
* /mavros/setpoint_attitude/reverse_thrust: False
* /mavros/setpoint_attitude/tf/child_frame_id: target_attitude
* /mavros/setpoint_attitude/tf/frame_id: map
* /mavros/setpoint_attitude/tf/listen: False
* /mavros/setpoint_attitude/tf/rate_limit: 50.0
* /mavros/setpoint_attitude/use_quaternion: False
* /mavros/setpoint_position/mav_frame: LOCAL_NED
* /mavros/setpoint_position/tf/child_frame_id: target_position
* /mavros/setpoint_position/tf/frame_id: map
* /mavros/setpoint_position/tf/listen: False
* /mavros/setpoint_position/tf/rate_limit: 50.0
* /mavros/setpoint_raw/thrust_scaling: 1.0
* /mavros/setpoint_velocity/mav_frame: LOCAL_NED
* /mavros/startup_px4_usb_quirk: False
* /mavros/sys/disable_diag: False
* /mavros/sys/min_voltage: 10.0
* /mavros/target_component_id: 1
* /mavros/target_system_id: 1
* /mavros/tdr_radio/low_rssi: 40
* /mavros/time/time_ref_source: fcu
* /mavros/time/timesync_avg_alpha: 0.6
* /mavros/time/timesync_mode: MAVLINK
* /mavros/vibration/frame_id: base_link
* /mavros/vision_pose/tf/child_frame_id: vision_estimate
* /mavros/vision_pose/tf/frame_id: odom
* /mavros/vision_pose/tf/listen: False
* /mavros/vision_pose/tf/rate_limit: 10.0
* /mavros/vision_speed/listen_twist: True
* /mavros/vision_speed/twist_cov: True
* /mavros/wheel_odometry/child_frame_id: base_link
* /mavros/wheel_odometry/count: 2
* /mavros/wheel_odometry/frame_id: odom
* /mavros/wheel_odometry/send_raw: True
* /mavros/wheel_odometry/send_twist: False
* /mavros/wheel_odometry/tf/child_frame_id: base_link
* /mavros/wheel_odometry/tf/frame_id: odom
* /mavros/wheel_odometry/tf/send: False
* /mavros/wheel_odometry/use_rpm: False
* /mavros/wheel_odometry/vel_error: 0.1
* /mavros/wheel_odometry/wheel0/radius: 0.05
* /mavros/wheel_odometry/wheel0/x: 0.0
* /mavros/wheel_odometry/wheel0/y: -0.15
* /mavros/wheel_odometry/wheel1/radius: 0.05
* /mavros/wheel_odometry/wheel1/x: 0.0
* /mavros/wheel_odometry/wheel1/y: 0.15
* /rosdistro: melodic
* /rosversion: 1.14.13
NODES
/
mavros (mavros/mavros_node)
auto-starting new master
process[master]: started with pid [11181]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to d64b58fc-11cc-11ef-b7de-60fb008ea472
process[rosout-1]: started with pid [11199]
started core service [/rosout]
process[mavros-2]: started with pid [11217]
[ INFO] [1715675696.377608422]: FCU URL: /dev/ttyPixhawk:921600
[ INFO] [1715675696.395212592]: serial0: device: /dev/ttyPixhawk @ 921600 bps
[ INFO] [1715675696.398885653]: GCS bridge disabled
[ INFO] [1715675696.449351865]: Plugin 3dr_radio loaded
[ INFO] [1715675696.457124846]: Plugin 3dr_radio initialized
[ INFO] [1715675696.457496369]: Plugin actuator_control loaded
[ INFO] [1715675696.489366502]: Plugin actuator_control initialized
[ INFO] [1715675696.490607053]: Plugin altitude loaded
[ INFO] [1715675696.497544347]: Plugin altitude initialized
[ INFO] [1715675696.498003492]: Plugin command loaded
[ INFO] [1715675696.555696494]: Plugin command initialized
[ INFO] [1715675696.556202343]: Plugin ftp loaded
[ INFO] [1715675696.615266897]: Plugin ftp initialized
[ INFO] [1715675696.615685507]: Plugin geofence loaded
[ INFO] [1715675696.645459168]: Plugin geofence initialized
[ INFO] [1715675696.646536910]: Plugin global_position loaded
[ INFO] [1715675696.808279776]: Plugin global_position initialized
[ INFO] [1715675696.809295469]: Plugin hil loaded
[ INFO] [1715675696.933497639]: Plugin hil initialized
[ INFO] [1715675696.934837416]: Plugin home_position loaded
[ INFO] [1715675696.970120909]: Plugin home_position initialized
[ INFO] [1715675696.971078166]: Plugin imu loaded
[ INFO] [1715675697.048638141]: Plugin imu initialized
[ INFO] [1715675697.049631087]: Plugin local_position loaded
[ INFO] [1715675697.110454403]: Plugin local_position initialized
[ INFO] [1715675697.111678858]: Plugin manual_control loaded
[ INFO] [1715675697.141407320]: Plugin manual_control initialized
[ INFO] [1715675697.142709776]: Plugin nav_controller_output loaded
[ INFO] [1715675697.149796322]: Plugin nav_controller_output initialized
[ INFO] [1715675697.150127379]: Plugin param loaded
[ INFO] [1715675697.179059848]: Plugin param initialized
[ INFO] [1715675697.180333597]: Plugin rallypoint loaded
[ INFO] [1715675697.206043508]: Plugin rallypoint initialized
[ INFO] [1715675697.206493164]: Plugin rc_io loaded
[ INFO] [1715675697.245727193]: Plugin rc_io initialized
[ INFO] [1715675697.245883674]: Plugin safety_area blacklisted
[ INFO] [1715675697.246168729]: Plugin setpoint_accel loaded
[ INFO] [1715675697.277922659]: Plugin setpoint_accel initialized
[ INFO] [1715675697.278348723]: Plugin setpoint_attitude loaded
[ INFO] [1715675697.371857824]: Plugin setpoint_attitude initialized
[ INFO] [1715675697.372631312]: Plugin setpoint_position loaded
[ INFO] [1715675697.534486953]: Plugin setpoint_position initialized
[ INFO] [1715675697.534873281]: Plugin setpoint_raw loaded
[ INFO] [1715675697.626618730]: Plugin setpoint_raw initialized
[ INFO] [1715675697.627051443]: Plugin setpoint_trajectory loaded
[ INFO] [1715675697.667967415]: Plugin setpoint_trajectory initialized
[ INFO] [1715675697.669239598]: Plugin setpoint_velocity loaded
[ INFO] [1715675697.720876193]: Plugin setpoint_velocity initialized
[ INFO] [1715675697.722677599]: Plugin sys_status loaded
[ INFO] [1715675697.822698117]: Plugin sys_status initialized
[ INFO] [1715675697.823476464]: Plugin sys_time loaded
[ INFO] [1715675697.883719664]: TM: Timesync mode: MAVLINK
[ INFO] [1715675697.886892672]: TM: Not publishing sim time
[ INFO] [1715675697.899547463]: Plugin sys_time initialized
[ INFO] [1715675697.899925096]: Plugin vfr_hud loaded
[ INFO] [1715675697.906242341]: Plugin vfr_hud initialized
[ INFO] [1715675697.907167516]: Plugin waypoint loaded
[ INFO] [1715675697.941619639]: Plugin waypoint initialized
[ INFO] [1715675697.942051521]: Plugin wind_estimation loaded
[ INFO] [1715675697.945027001]: Plugin wind_estimation initialized
[ INFO] [1715675697.945448047]: Built-in SIMD instructions: ARM NEON
[ INFO] [1715675697.945592796]: Built-in MAVLink package version: 2022.12.30
[ INFO] [1715675697.945769833]: Known MAVLink dialects: common ardupilotmega ASLUAV AVSSUAS all cubepilot development icarous matrixpilot paparazzi standard storm32 uAvionix ualberta
[ INFO] [1715675697.945993798]: MAVROS started. MY ID 1.240, TARGET ID 1.1
[ INFO] [1715675697.946338536]: IMU: Attitude quaternion IMU detected!
[ INFO] [1715675697.947312397]: IMU: High resolution IMU detected!
[ INFO] [1715675697.948058169]: RC_CHANNELS message detected!
[ INFO] [1715675697.952518960]: CON: Got HEARTBEAT, connected. FCU: PX4 Autopilot
[ INFO] [1715675697.963923050]: IMU: Scaled IMU message used.
[ INFO] [1715675697.964088515]: IMU: High resolution IMU detected!
[ INFO] [1715675697.964226455]: IMU: Attitude quaternion IMU detected!
[ INFO] [1715675697.965281290]: RC_CHANNELS message detected!
[ERROR] [1715675698.761796814]: FCU: Onboard controller lost
[ INFO] [1715675698.968550240]: GF: Using MISSION_ITEM_INT
[ INFO] [1715675698.969252450]: RP: Using MISSION_ITEM_INT
[ INFO] [1715675698.969874132]: WP: Using MISSION_ITEM_INT
[ INFO] [1715675698.970326191]: VER: 1.1: Capabilities 0x000000000000e4ef
[ INFO] [1715675698.970796281]: VER: 1.1: Flight software: 010a0000 (c45bd6e872000000)
[ INFO] [1715675698.971316528]: VER: 1.1: Middleware software: 010a0000 (c45bd6e872000000)
[ INFO] [1715675698.971532536]: VER: 1.1: OS software: 071d00ff (427238133be2b0ec)
[ INFO] [1715675698.971615749]: VER: 1.1: Board hardware: 00000011
[ INFO] [1715675698.971746881]: VER: 1.1: VID/PID: 26ac:0011
[ INFO] [1715675698.971842658]: VER: 1.1: UID: 3335510837373430
[ WARN] [1715675698.972167453]: CMD: Unexpected command 520, result 0
[ INFO] [1715675699.055004965]: FCU: Onboard controller regained
[ INFO] [1715675701.232657391]: FCU: ARMED by Arm/Disarm component command
[ INFO] [1715675701.286969864]: FCU: [logger] file: /fs/microsd/log/2024-05-14/08_35_0
[ INFO] [1715675707.960364047]: HP: requesting home position
[ WARN] [1715675709.020135386]: CMD: Unexpected command 176, result 0
[ERROR] [1715675711.211814346]: FCU: REJECT OFFBOARD
[ INFO] [1715675711.280602765]: FCU: DISARMED by Auto disarm initiated
[ INFO] [1715675712.962459679]: GF: mission received
[ERROR] [1715675712.965472825]: FCU: IGN REQUEST LIST: Busy
[ INFO] [1715675712.976872902]: WP: item #0* F:6 C: 22 p: 15 0 0 nan x: 396205793 y: 1181552942 z: 2
[ INFO] [1715675712.980427704]: WP: item #1 F:6 C: 16 p: 0 0 0 nan x: 396204662 y: 1181554316 z: 2
[ INFO] [1715675712.985196142]: WP: item #2 F:2 C:178 p: 1 0.5 -1 0 x: 0 y: 0 z: 0
[ INFO] [1715675712.985354121]: WP: mission received
[ WARN] [1715675713.959869771]: RP: timeout, retries left 2
[ INFO] [1715675713.970165441]: RP: mission received
[ INFO] [1715675717.959449772]: HP: requesting home position
[ INFO] [1715675727.959407664]: HP: requesting home position
[ INFO] [1715675737.959305518]: HP: requesting home position
[ INFO] [1715675747.959309874]: HP: requesting home position
[ INFO] [1715675757.959443078]: HP: requesting home position
[ INFO] [1715675767.959230481]: HP: requesting home position
[ INFO] [1715675770.157655071]: FCU: ARMED by Arm/Disarm component command
[ INFO] [1715675770.216924254]: FCU: [logger] file: /fs/microsd/log/2024-05-14/08_36_1
[ WARN] [1715675770.218955684]: CMD: Unexpected command 176, result 1
[ INFO] [1715675777.959654419]: HP: requesting home position
[ INFO] [1715675780.214064799]: FCU: DISARMED by Auto disarm initiated
[ERROR] [1715675783.189221669]: FCU: REJECT POSITION CONTROL
[ INFO] [1715675787.959387434]: HP: requesting home position
[ INFO] [1715675797.959375133]: HP: requesting home position
[ INFO] [1715675807.959617671]: HP: requesting home position
[ INFO] [1715675817.959319550]: HP: requesting home position
[ INFO] [1715675827.959299274]: HP: requesting home position
[ WARN] [1715675829.928186240]: CMD: Unexpected command 512, result 3
[ INFO] [1715675837.959373531]: HP: requesting home position
[ INFO] [1715675847.959448151]: HP: requesting home position
[ERROR] [1715675851.661611427]: FCU: Data link lost
[ WARN] [1715675851.996496714]: CMD: Unexpected command 519, result 0
[ INFO] [1715675852.022973038]: FCU: Data link regained
[ INFO] [1715675857.959313474]: HP: requesting home position
[ INFO] [1715675867.959357900]: HP: requesting home position
[ INFO] [1715675877.959357155]: HP: requesting home position
[ INFO] [1715675887.959399285]: HP: requesting home position
[ INFO] [1715675897.959389979]: HP: requesting home position
[ INFO] [1715675904.268346051]: WP: seems GCS requesting mission
[ INFO] [1715675904.269123604]: WP: scheduling pull after GCS is done
[ INFO] [1715675907.959641576]: HP: requesting home position
[ INFO] [1715675909.272729842]: WP: mission received
[ INFO] [1715675917.959349790]: HP: requesting home position
[ INFO] [1715675919.467535147]: WP: seems GCS requesting mission
[ INFO] [1715675919.468321520]: WP: scheduling pull after GCS is done
[ INFO] [1715675924.478845156]: WP: item #0* F:6 C: 22 p: 15 0 0 nan x: 396205557 y: 1181553145 z: 50
[ INFO] [1715675924.481860202]: WP: item #1 F:6 C: 16 p: 0 0 0 nan x: 396205389 y: 1181554630 z: 50
[ INFO] [1715675924.482051416]: WP: mission received
[ INFO] [1715675925.676943206]: FCU: ARMED by Arm/Disarm component command
[ WARN] [1715675925.723924462]: CMD: Unexpected command 176, result 1
[ INFO] [1715675925.736471220]: FCU: [logger] file: /fs/microsd/log/2024-05-14/08_38_4
[ INFO] [1715675927.960145305]: HP: requesting home position
[ INFO] [1715675935.750942670]: FCU: DISARMED by Auto disarm initiated
[ INFO] [1715675937.959345960]: HP: requesting home position
[ INFO] [1715675947.959333213]: HP: requesting home position
[ INFO] [1715675957.959455360]: HP: requesting home position
[ INFO] [1715675967.959403974]: HP: requesting home position
[ INFO] [1715675977.959543660]: HP: requesting home position
[ INFO] [1715675987.959381384]: HP: requesting home position
[ INFO] [1715675989.482054554]: WP: seems GCS requesting mission
[ INFO] [1715675989.482814017]: WP: scheduling pull after GCS is done
[ INFO] [1715675994.495579809]: WP: item #0* F:2 C:178 p: 1 0.5 -1 0 x: 0 y: 0 z: 0
[ INFO] [1715675994.502682479]: WP: item #1 F:6 C: 22 p: 15 0 0 nan x: 396205557 y: 1181553145 z: 2
[ INFO] [1715675994.510599395]: WP: item #2 F:6 C: 16 p: 0 0 0 nan x: 396205389 y: 1181554630 z: 2
[ INFO] [1715675994.514962111]: WP: item #3 F:2 C: 20 p: 0 0 0 0 x: 0 y: 0 z: 0
[ INFO] [1715675994.515124025]: WP: mission received
[ INFO] [1715675997.959096571]: HP: requesting home position
[ INFO] [1715675999.197854917]: FCU: ARMED by Arm/Disarm component command
[ WARN] [1715675999.239175477]: CMD: Unexpected command 176, result 1
[ INFO] [1715675999.252850485]: FCU: [logger] file: /fs/microsd/log/2024-05-14/08_39_5
[ INFO] [1715676007.959544276]: HP: requesting home position
[ INFO] [1715676009.252371020]: FCU: DISARMED by Auto disarm initiated
[ INFO] [1715676017.959338028]: HP: requesting home position
[ERROR] [1715676020.638230663]: FCU: REJECT OFFBOARD
[ERROR] [1715676021.636798871]: FCU: REJECT OFFBOARD
[ERROR] [1715676022.688375534]: FCU: REJECT OFFBOARD
[ INFO] [1715676027.959324036]: HP: requesting home position
[ INFO] [1715676037.959378294]: HP: requesting home position
^C[mavros-2] killing on exit
Debug: mavconn: serial0: recv: v2.0 !CRC Message-Id: 42 [1 bytes] IDs: 1.1 Seq: 254
Debug: mavconn: serial0: recv: v2.0 !CRC Message-Id: 331 [230 bytes] IDs: 1.1 Seq: 255
Debug: mavconn: serial0: recv: v2.0 !CRC Message-Id: 32 [28 bytes] IDs: 1.1 Seq: 0
Debug: mavconn: serial0: recv: v2.0 !CRC Message-Id: 140 [40 bytes] IDs: 1.1 Seq: 1
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
mavros_run
(base) ubuntu@ubuntu:~/src/uav_space/pythonuav_ros$ python3 px4_mavros_run.py /home/ubuntu/src/uav_space/pythonuav_ros/px4_mavros_run.py:100: SyntaxWarning: "is" with a literal. Did you mean "=="?
if (self.state is "LAND") and (self.local_pose.pose.position.z < -1.0):
Px4 Controller Initialized!
Received New Position Task!
body FLU frame
Vehicle Took Off Failed!
commander
(base) ubuntu@ubuntu:~/src/uav_space/pythonuav_ros$ python commander.py
无法执行代码中的示例程序,该如何调整