在Kerloud Astro无人车的开发过程中,机载电脑扮演着至关重要的角色。本次教程将初步介绍如何使用搭载Nvidia Jetson Nano的机载电脑,以及它如何与各类传感器协同工作的方法。
系统概览
- 硬件核心:Nvidia Jetson Nano
- 操作系统:Ubuntu 18.04 LTS
- 机器人操作系统:ROS(Robot Operating System)
- 与控制器通信协议:MAVLink
- 传感器套件:深度相机、CSI相机和激光雷达
设备准备
在开始之前,请确保您拥有以下设备:
- Kerloud Astro无人车
- 无人车充电器
- 显示屏(用于机载电脑的可视化操作)
- 键盘和鼠标(用于机载电脑的交互)
连接设备
根据提供的接口图,将显示屏、键盘和鼠标连接到机载电脑上。连接充电器,启动无人车,等待Ubuntu系统完成启动过程。

启动ROS并测试激光雷达模块
1. 打开终端:在Ubuntu系统中打开终端窗口,准备进行ROS环境的配置和编译。
2. 编译ROS节点:在启动ROS节点之前,确保所有的ROS节点代码已经正确编写,并且需要编译的包已经放置在正确的目录中。使用以下命令编译ROS包:
cd ~/src/catkinws_laserslam
catkin build
这里的~/src/catkinws_laserslam是激光雷达的ROS工作空间路径,启动其他模块时,对应进行替换。
3. 启动ROS核心服务:
roscore
4. 启动激光雷达的ROS节点:
cd ~/src/catkinws_laserslam
bash run_2d.sh
run 2d.sh 将依次启用室内激光SLAM的所有节点。
5. 测试激光雷达数据:启动可视化进程,以验证其正常工作:
cd ~/src/catkinws_laserslam
source devel/setup.bash
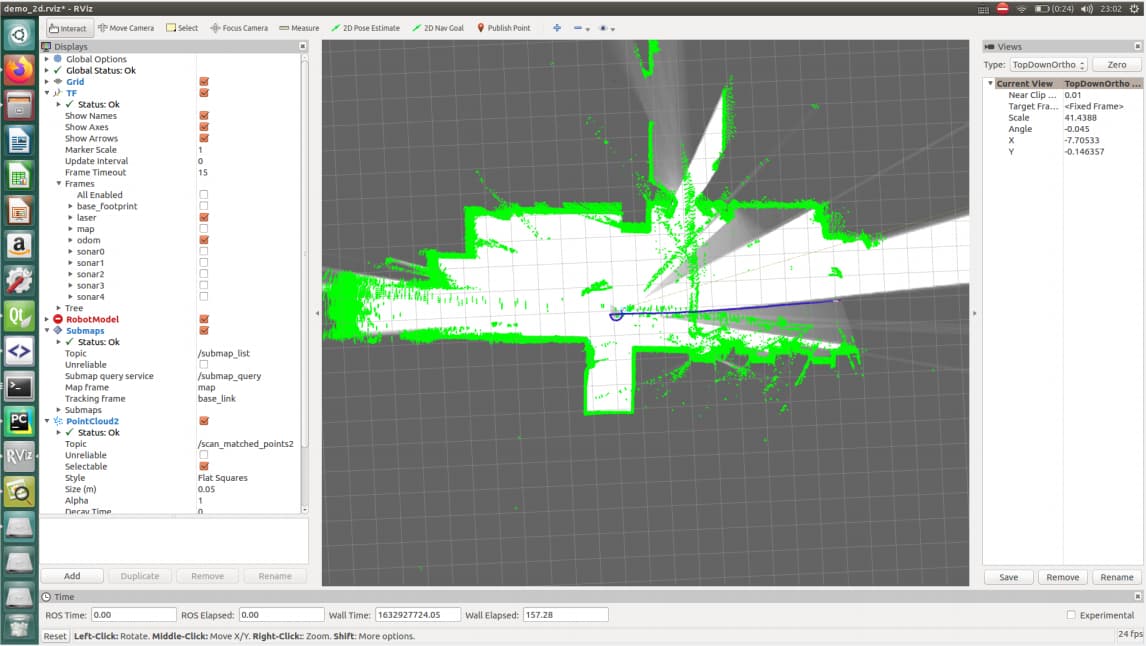
roslaunch robot_laserslam visualization.launch
如果您正确执行以上步骤,将会弹出rviz窗口,并显示slam输出如下:
结语
通过本教程的学习,你已经掌握了启动Kerloud Astro无人车的机载电脑,并进行了基本的ROS环境设置和激光雷达模块测试。这为进一步的无人车开发和应用开发奠定了坚实的基础。