Kerloud Astro无人车的系统组成解析
引言
Kerloud Astro无人车是一个面向自动驾驶领域的开发平台,它集成了多种先进的技术组件,旨在为研究人员和开发者提供一个功能全面、易于扩展的实验和开发环境。本文将深入探讨Kerloud Astro无人车的系统组成,以及这些组件是如何协同工作,实现高级自动驾驶功能的。
Kerloud Astro无人车的系统组成
核心组件
- Kerloud Mini自动驾驶仪:作为车体运动控制的核心单元,该自动驾驶仪遵循PX4软硬件开源设计,确保了系统的开放性和可扩展性。
- 机载电脑:可选配NVIDIA Jetson Nano或Xavier NX,这些高性能计算平台为任务管理或高端任务处理提供了强大的支持。
- 麦克纳姆轮电机套件:作为车体的推进动力系统,麦克纳姆轮的设计允许无人车实现多方向移动,增加了其机动性。
感知与定位组件
- 深度相机:采用Intel RealSense技术,提供实时深度感知和SLAM三维建模,为无人车的环境理解和路径规划提供了强有力的视觉支持。
- CSI相机:提供高质量的图像识别和视频流传输,适用于各种计算机视觉和嵌入式系统应用。
- 激光雷达:LD19型号,用于实现精准的远距离距离测量和环境感知,是无人车安全导航的关键传感器之一。
- UWB:即超宽带技术,提供高精度定位和距离测量,尤其适用于室内定位、精准导航和集群编队等场景。
通信与控制组件
- 数传:作为连接机载飞控和地面站的通信设备,确保了数据的实时传输和系统的远程控制能力。
- Kerloud Rover MCU & Power Module:通过CAN总线与Kerloud自动驾驶仪通信,解析控制信号,驱动电机执行相应任务,是驱动层的核心组件。
Kerloud Astro无人车的系统架构
如下图所示,Kerloud Astro的系统架构可以分为三个层次:
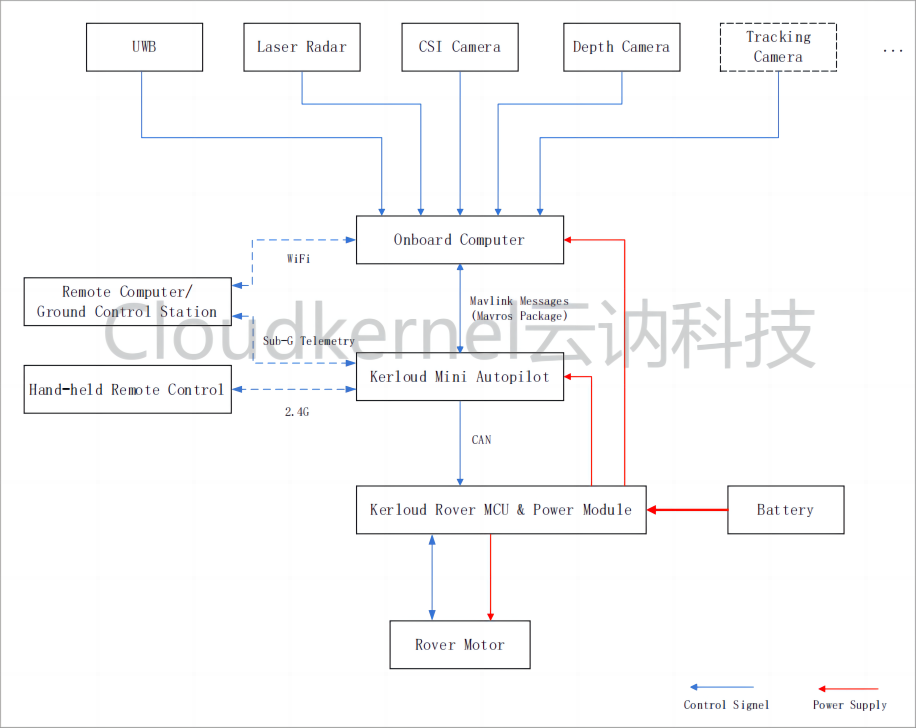
感知应用层
以机载电脑为核心,搭载深度相机、CSI相机和激光雷达,这一层的主要任务是实现系统的环境感知和数据获取,为上层的应用开发提供支持。
控制层
核心是Kerloud自动驾驶仪,与数传、地面站、IMU(惯性测量单元)、UWB、RC遥控器等组件协同工作,生成控制信号,确保无人车的稳定运行和精确控制。
驱动层
以Kerloud Rover MCU为核心,通过CAN总线与Kerloud自动驾驶仪通信,解析控制信号,驱动电机执行相应任务,是无人车动力输出的关键环节。