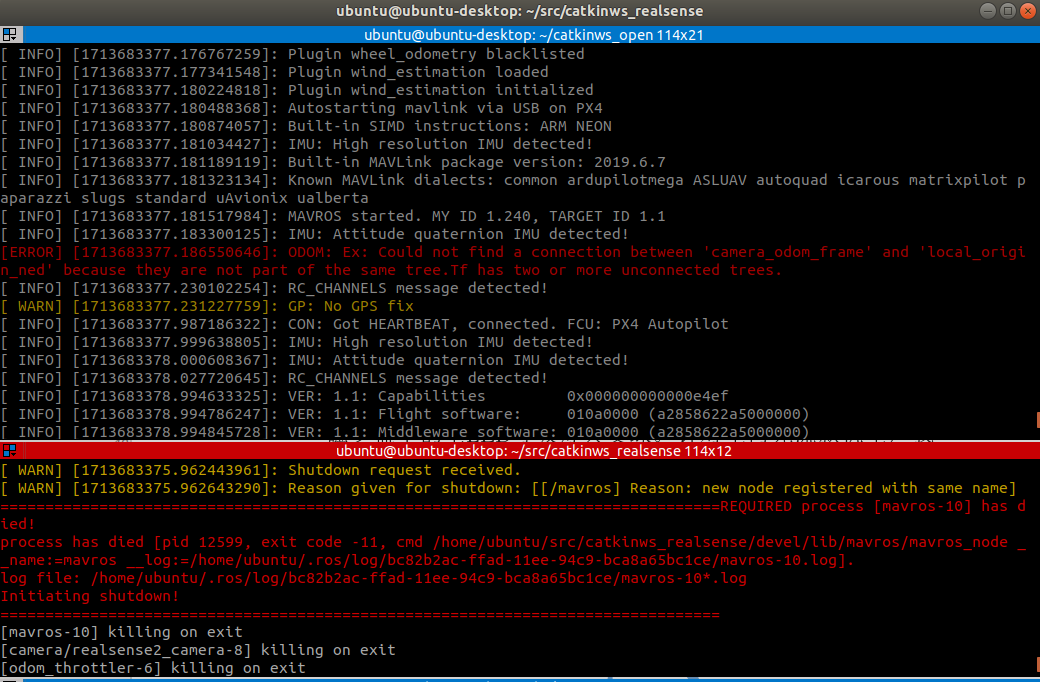
室内VIO无人机在执行/src/catkinws_realsense中的run.sh后,再按照
source devel/setup.bash
roslaunch mavros px4.launch
结果realsense定位直接异常退出了,这是什么情况?这个异常退出后rostopic看不到任何话题,这个要怎么解决?
您好,run.sh脚本内容中默认启动了mavros,不需要额外再启动mavros,建议看下run.sh脚本内容加深理解
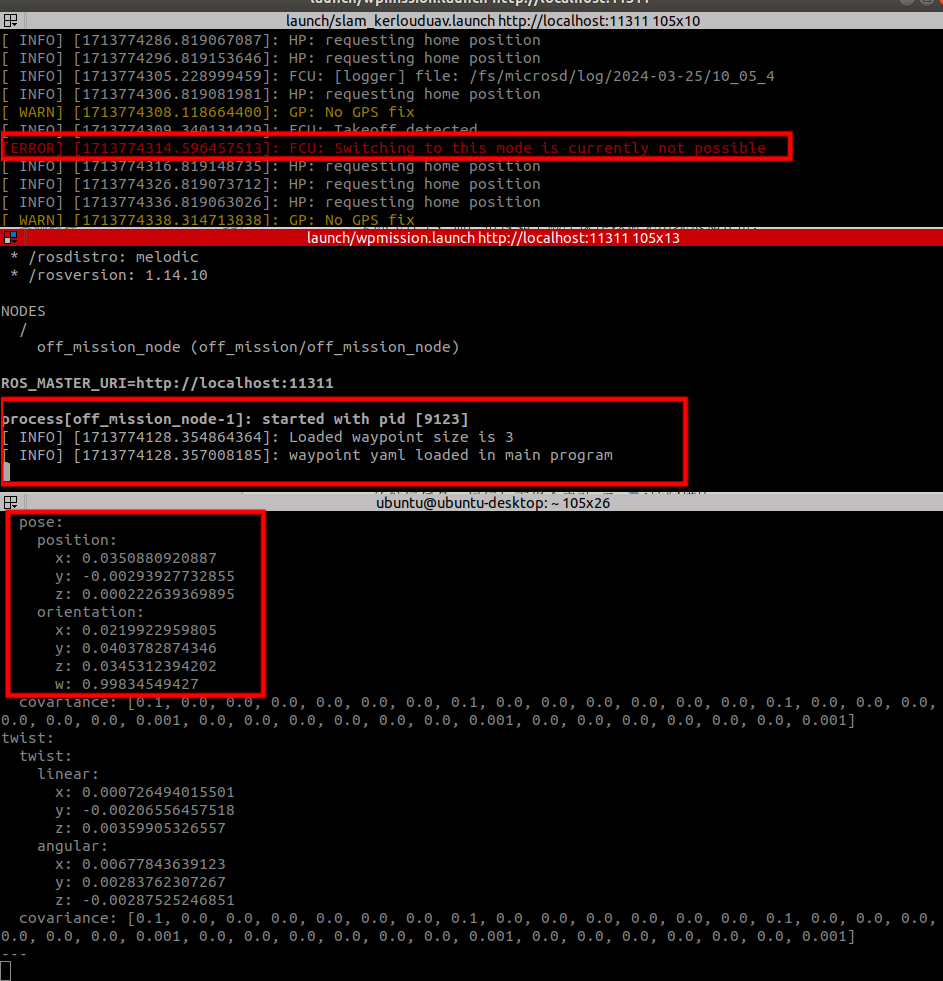
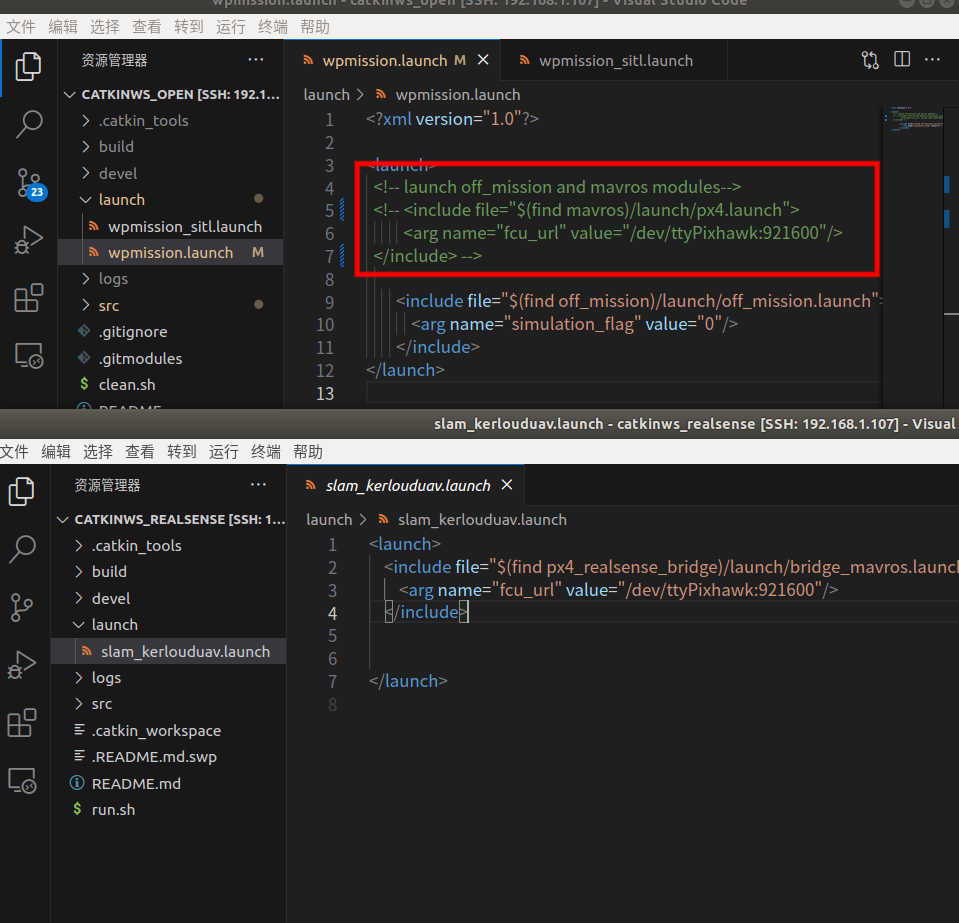
我是想先启动深度相机进行定位,然后执行yaml文件中的航点飞行。run.sh启动相机后再启动航点的launch就会异常退出,航点飞行的launch并没有包含深度相机定位的部分呀,按照航点飞行不需要启动深度相机吗?
您需要启动视觉定位,再把航路点飞行launch文件中的mavros 部分关闭下,这样才能在室内环境下飞行
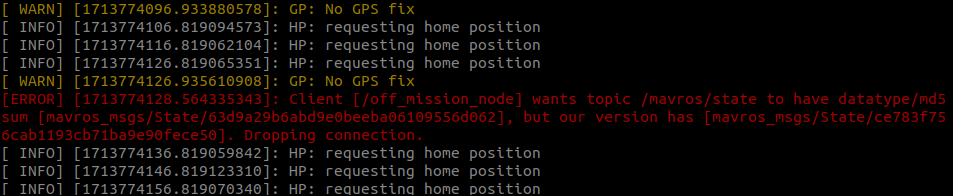
您需要在启动offboard 在线控制的终端中source Kerloud 无人机的mavros 环境,即source devel/setup.bash,然后再启动launch文件。该错误信息源于我们程序使用了自定义的mavros 包,和系统自带的不一样
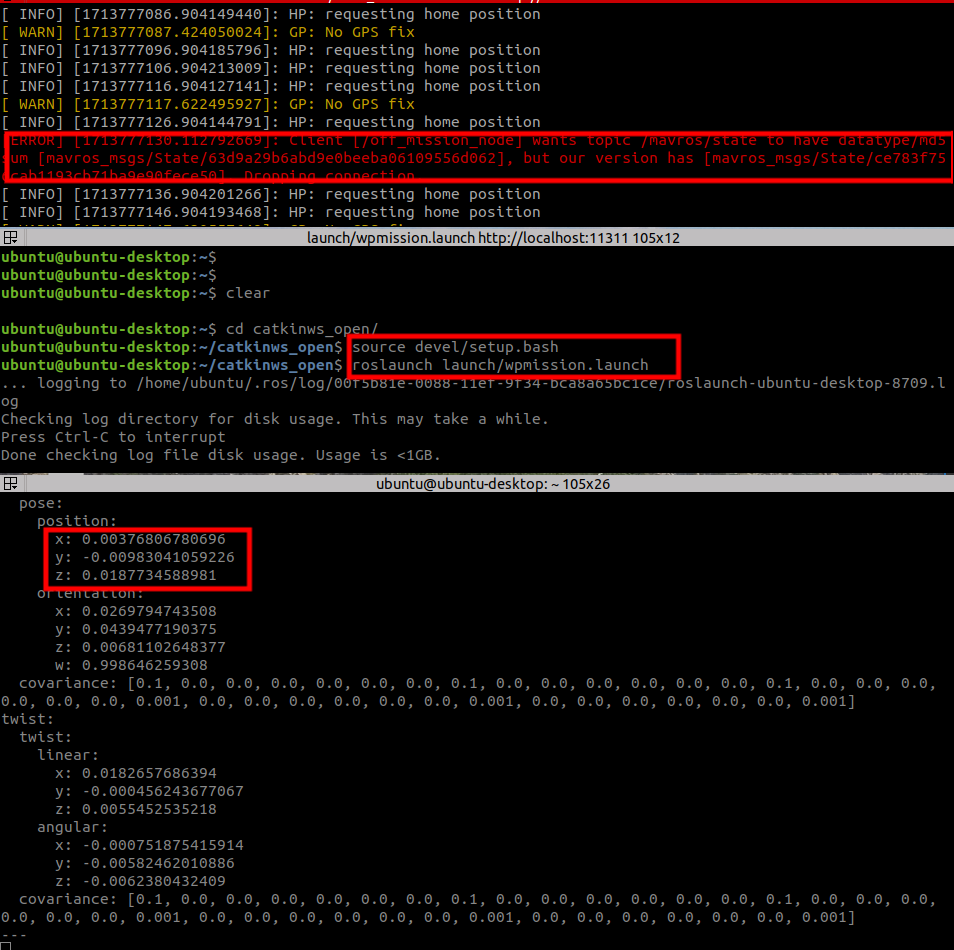
您需要把catkinws_open和catkinws_realsense中的mavros和mavlink包都升级成最新版本(注意需要都是dev_kerlouduav分支),然后重新编译下两个工作区
-
mavros (dev_kerlouduav branch): GitHub - cloudkernel-tech/mavros: repo host for: https://github.com/mavlink/mavros.git
-
mavlink (dev_kerlouduav branch): GitHub - cloudkernel-tech/mavlink-gdp-release: repo host for: https://github.com/mavlink/mavlink-gbp-release.git
只有这样,两个workspace对应的mavros消息才能统一