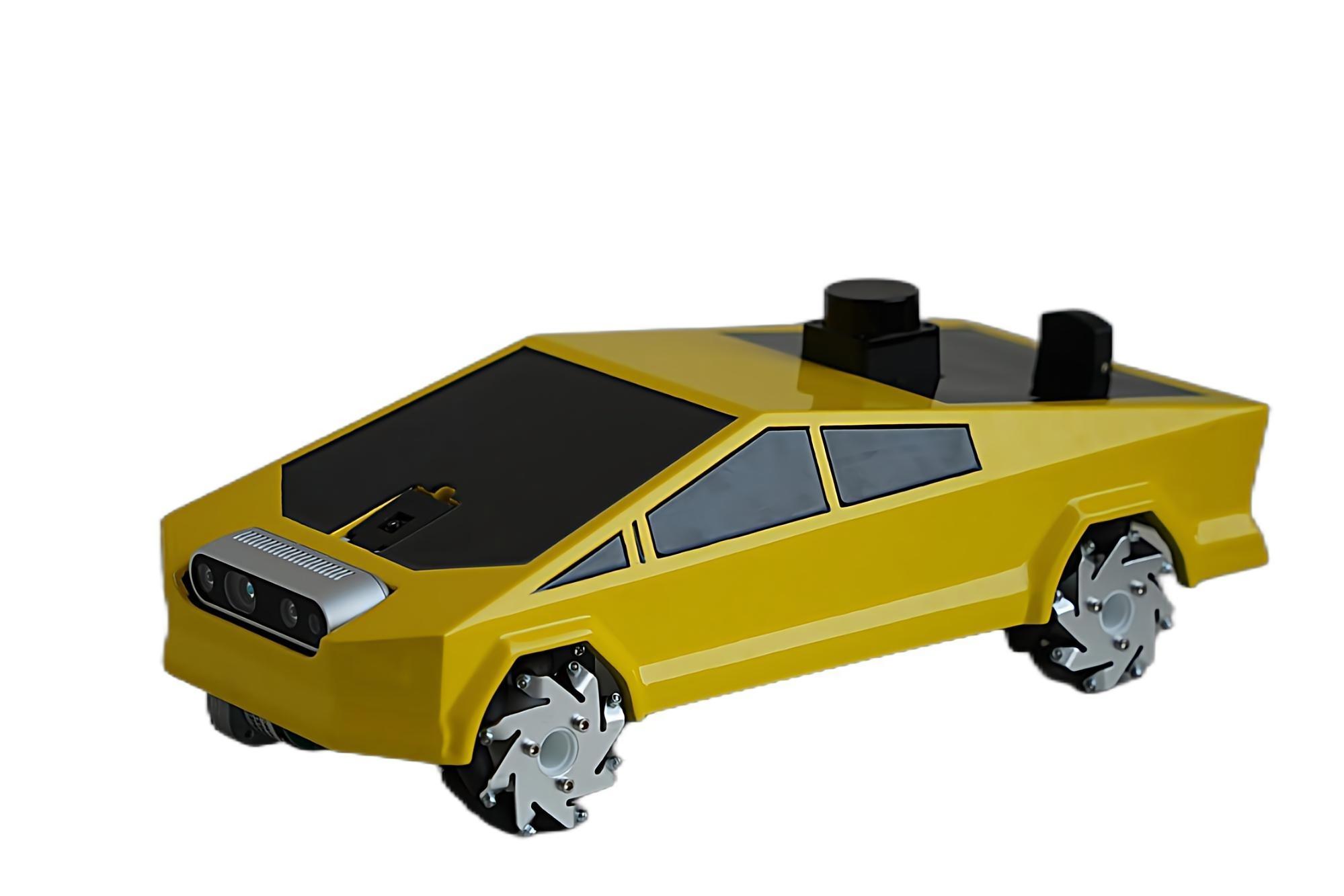
Kerloud Astro无人车提供了一个到手使用的自动驾驶开发平台,它配备了机器视觉相机和激光雷达,可以实现基于视觉或激光的定位和建图。搭载NVIDIA板载计算机,预装了优化的ubuntu操作系统。开源的C++和python SDK大大降低了新手用户操作的难度,为用户提供了灵活、易用的开发环境,非常适合工程教育和无人车竞赛使用。
Kerloud Astro无人车具有以下特点:
- 基于Tesla Cybertruck 1:10比例还原,尾部设计统一的调试充电接口;
- 利用麦克纳姆轮技术实现全向移动;
- 支持ROS机器人软件系统开发和多机集群开发;
- 提供视觉SLAM、激光SLAM、路径规划、深度学习等多种应用。
用户通过我们提供的一系列软硬件教程和案例训练,可以逐步学习到以下知识,有助于未来进入相关机器人行业领域发展。
- 熟悉无人车的操作和开发,掌握其基本原理和功能;
- 接触最前沿的无人系统开源社区知识,了解行业最新发展和技术趋势;
- 熟悉ROS机器人操作系统的使用,能够利用ROS进行系统开发和控制;
- 掌握机器视觉相机和激光雷达的基本原理和使用方法,了解其在无人车中的应用场景。
- 掌握使用机器视觉相机和激光雷达进行定位、建图和导航的方法,为未来从事自动驾驶行业提供必要的技术基础。